



















4 - 13
4. OPERATION AND DISPLAY
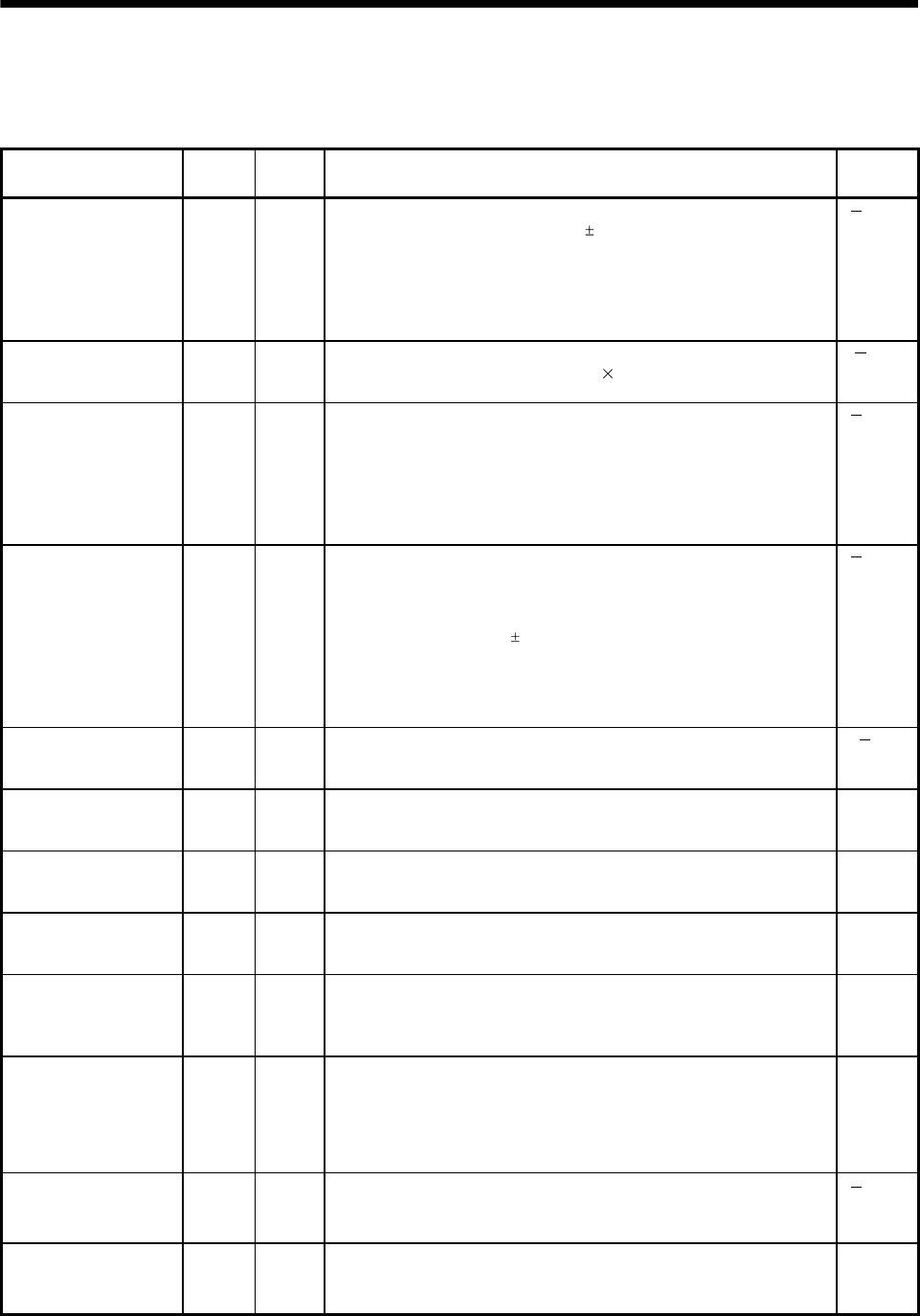
(2) Drive unit status display list
The following table lists the servo statuses that may be shown:
Refer to Appendix 2 for the measurement point.
Name Symbol Unit Description
Display
range
Cumulative feedback
pulses
@.C pulse Feedback pulses from the servo motor encoder are counted and
displayed. The value in excess of
99999 is counted, bus since the
interface display is five digits, it shows the lower five digits of the
actual value. Press the
"SET" button to reset the display value to
zero.
Reverse rotation is indicated by the lit decimal points in the upper
four digits.
99999
to
99999
Servo motor speed @.r r/min The servo motor speed is displayed.
The value rounded off is displayed in
0.1r/min.
5400
to
5400
Droop pulses @.E pulse The number of droop pulses in the deviation counter is displayed.
When the servo motor is rotating in the reverse direction, the
decimal points in the upper four digits are lit.
Since the servo amplifier display is five digits, it shows the lower five
digits of the actual value.
The number of pulses displayed is not yet multiplied by the electronic
gear.
99999
to
99999
Cumulative command
pulses
@.P pulse The position command input pulses are counted and displayed.
As the value displayed is not yet multiplied by the electronic gear
(CMX/CDV), it may not match the indication of the cumulative
feedback pulses.
The value in excess of
99999 is counted, but since the interface
display is five digits, it shows the lower five digits of the actual value.
Press the "SET" button to reset the display value to zero. When the
servo motor is rotating in the reverse direction, the decimal points in
the upper four digits are lit.
99999
to
99999
Command pulse
frequency
@.n kpps The frequency of the position command input pulses is displayed.
The value displayed is not multiplied by the electronic gear
(CMX/CDV).
800
to
800
Effective load ratio @.J % The continuous effective load torque is displayed.
The effective value in the past 15 seconds is displayed relative to the
rated torque of 100%.
0
to
300
Peak load ratio @.b % The maximum torque generated during acceleration/deceleration, etc.
The highest value in the past 15 seconds is displayed relative to the
rated torque of 100%.
0
to
400
Instantaneous torque @.T % Torque that occurred instantaneously is displayed.
The value of the torque that occurred is displayed in real time
relative to the rate torque of 100%.
0
to
400
Within one-revolution
position Low
@.CY1 pulse Position within one revolution is displayed in encoder pulses.
The value returns to
"0" when it exceeds the maximum number of
pulses.
The value is incremented in the
"CCW" direction of rotation.
0
to
99999
Within one-revolution
position High
@.CY2 100
pulse
The within one-revolution position is displayed in 100 pulse
increments of the encoder.
The value returns to
"0" when it exceeds the maximum number of
pulses.
The value is incremented in the
"CCW" direction of rotation.
0
to
13107
ABS counter @.LS rev Travel value from the home position in the absolute position
detection systems is displayed in terms of the absolute position
detectors counter value.
32768
to
32768
Load inertia moment
ratio
@.dC 0.1
Times
The estimated ratio of the load inertia moment to the servo motor
shaft inertia moment is displayed.
0.0
to
300.0