


















14 - 6
14. ABSOLUTE POSITION DETECTION SYSTEM
14.6.2 Transfer method
The sequence in which the base circuit is turned ON (servo-on) when it is in the OFF state due to the
servo-on (SON
) going OFF, a forced stop, or alarm, is explained below. In the absolute position
detection system, always give the serial communication command to read the current position in the drive
unit to the controller every time the ready (RD
) turns on. The drive unit sends the current position to
the controller on receipt of the command. At the same time, this data is set as a position command value
in the drive unit.
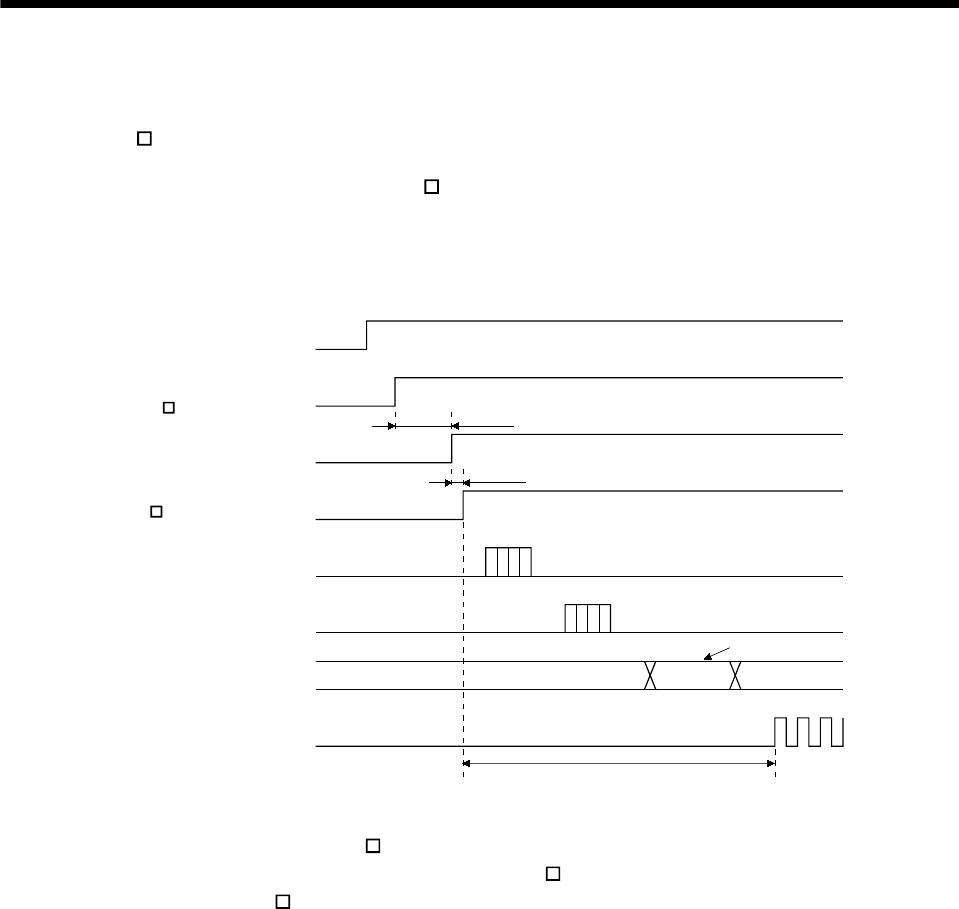
(1) Sequence processing at power-on
OFF
100ms
ON
OFF
ON
OFF
ON
OFF
ON
20ms
ABS data
Power
supply
Base
circuit
Absolute position data
command transmission
Absolute position data
receive
Current position
Pulse train command
Current position change
During this period, get absolute position data.
Servo-on
(SON )
Ready
(RD )
1) 100ms after the servo-on (SON ) has turned on, the base circuit turns on.
2) After the base circuit has turned on, the ready (RD
) turns on.
3) After the ready (RD ) turned on and the controller acquired the absolute position data, give
command pulses to the drive unit. Providing command pulses before the acquisition of the
absolute position data can cause a position shift.
(2) Communication error
If a communication error occurs between the controller and MELSERVO-J2M, the MELSERVO-J2M
sends the error code. The definition of the error code is the same as that of the communication
function. Refer to Section 13.5 for details.
If a communication error has occurred, perform retry operation. If several retries do not result in a
normal termination, perform error processing.