


















3 - 26
3. SIGNALS AND WIRING
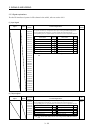
3.3.4 Device explanations
(1) Input device
Using the MR Configurator (servo configuration software), you can assign the devices given in this
section to the pins of connectors CN4A and CN4B of the MR-J2M-D01 extension IO unit.
Device name Symbol Functions/Applications
Internal torque limit selection 1 TL11
Internal torque limit selection 2 TL12
Internal torque limit selection 3 TL13
Internal torque limit selection 4 TL14
Internal torque limit selection 5 TL15
Internal torque limit selection 6 TL16
Internal torque limit selection 7 TL17
Internal torque limit selection 8
TL18
TL11: Internal torque limit selection device for slot 1
TL12: Internal torque limit selection device for slot 2
TL13: Internal torque limit selection device for slot 3
TL14: Internal torque limit selection device for slot 4
TL15: Internal torque limit selection device for slot 5
TL16: Internal torque limit selection device for slot 6
TL17: Internal torque limit selection device for slot 7
TL18: Internal torque limit selection device for slot 8
Refer to Section 3.3.5 (2) for details.
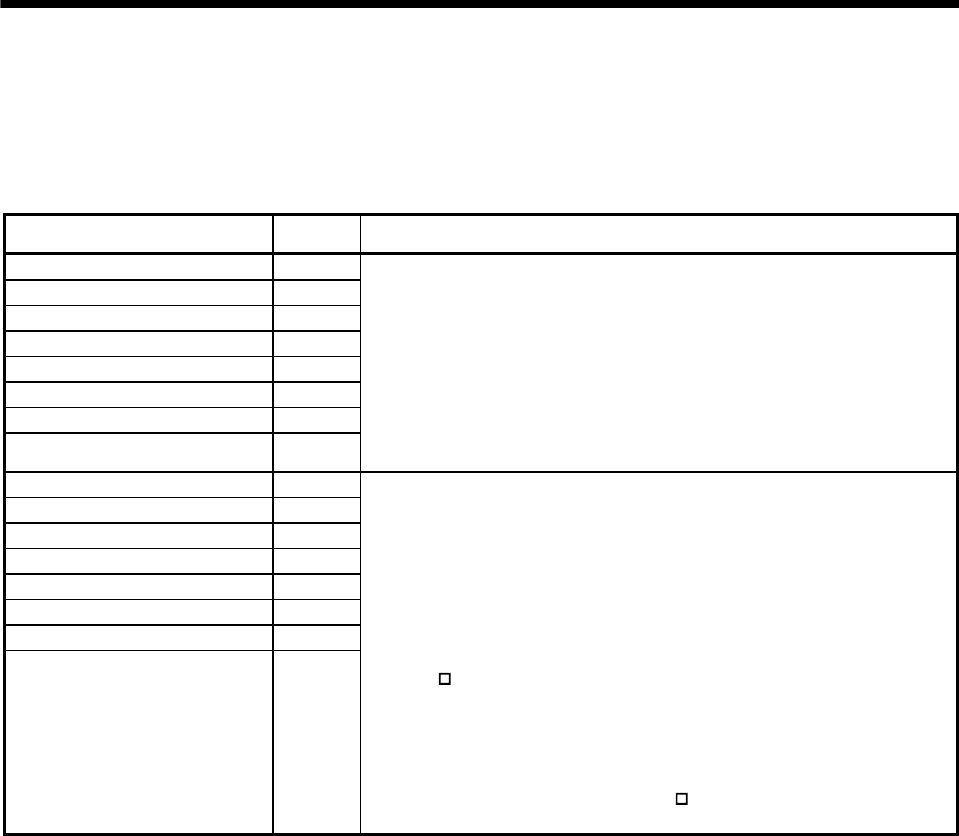
Proportion control 1 PC1
Proportion control 2 PC2
Proportion control 3 PC3
Proportion control 4 PC4
Proportion control 5 PC5
Proportion control 6 PC6
Proportion control 7 PC7
Proportion control 8 PC8
PC1: Proportion control device for slot 1
PC2: Proportion control device for slot 2
PC3: Proportion control device for slot 3
PC4: Proportion control device for slot 4
PC5: Proportion control device for slot 5
PC6: Proportion control device for slot 6
PC7: Proportion control device for slot 7
PC8: Proportion control device for slot 8
Short PC
-SG to switch the speed amplifier from the proportional integral
type to the proportional type.
If the servo motor at a stop is rotated even one pulse due to any external
factor, it generates torque to compensate for a position shift. When the servo
motor shaft is to be locked mechanically after positioning completion (stop),
switching on the proportion control (PC
) upon positioning completion will
suppress the unnecessary torque generated to compensate for a position shift.