


















9 - 10
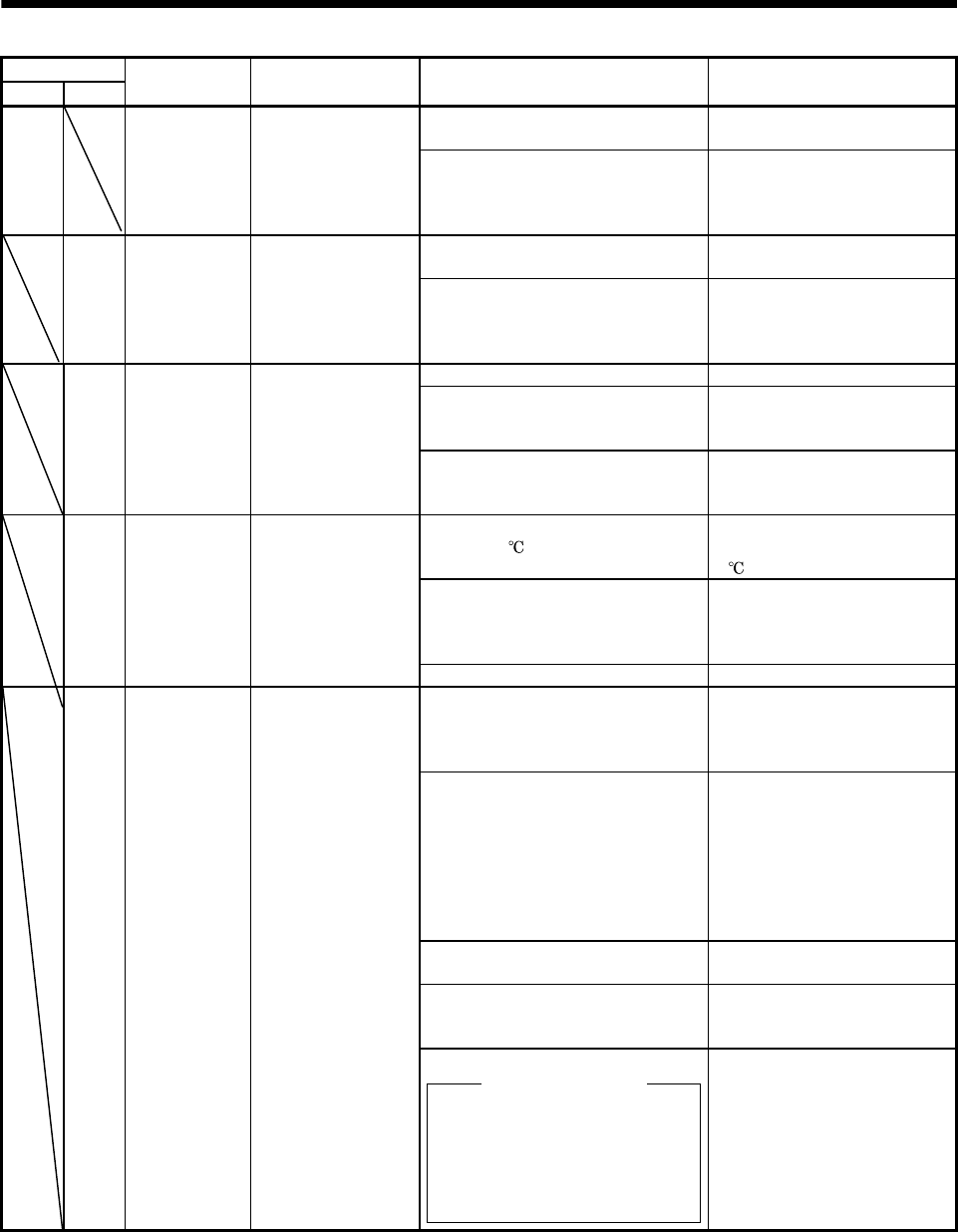
9. TROUBLESHOOTING
Display
IFU DRU
Name Definition Cause Action
FA.37 IFU parameter
error
IFU parameter
setting is wrong.
1. Interface unit fault caused the IFU
parameter setting to be rewritten.
Change the interface unit.
2. The number of write times to EEP-
ROM exceeded 100,000 due to
parameter write, program write,
etc.
Change the interface unit
@A.37@ DRU parameter
error
DRU parameter
setting is wrong.
1. Drive unit fault caused the DRU
parameter setting to be rewritten.
Change the drive unit.
2. The number of write times to EEP-
ROM exceeded 100,000 due to
parameter write, program write,
etc.
Change the drive unit.
1. Drive unit faulty. Change the drive unit.
2. The power supply was turned on
and off continuously by overloaded
status.
The drive method is reviewed.
@A.45@ Main circuit
device overheat
Main circuit device
overheat.
3. Air cooling fan of drive unit stops. 1. Change the drive unit or
cooling fan.
2. Reduce ambient temperature.
1. Ambient temperature of servo motor
is over 40
.
Review environment so that
ambient temperature is 0 to
40
.
2. Servo motor is overloaded. 1. Reduce load.
2. Review operation pattern.
3. Use servo motor that provides
larger output.
@A.46@ Servo motor
overheat
Servo motor
temperature rise
actuated the thermal
sensor.
3. Thermal sensor in encoder is faulty. Change servo motor.
1. Drive unit is used in excess of its
continuous output current.
1. Reduce load.
2. Review operation pattern.
3. Use servo motor that provides
larger output.
2. Servo system is instable and
hunting.
1. Repeat acceleration/
deceleration to execute auto
tuning.
2. Change auto tuning response
level setting.
3. Set auto tuning to OFF and
make gain adjustment
manually.
3. Machine struck something. 1. Review operation pattern.
2. Install limit switches.
4. Wrong connection of servo motor.
Drive unit's output U, V, W do not
match servo motor's input U, V, W.
Connect correctly.
@A.50@ Overload 1 Load exceeded
overload protection
characteristic of servo
amplifier.
5. Encoder faulty.
Checking method
When the servo motor shaft is
rotated with the servo off, the
cumulative feedback pulses do
not vary in proportion to the
rotary angle of the shaft but the
indication skips or returns midway.
Change the servo motor.