


















3 - 43
3. SIGNALS AND WIRING
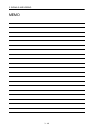
3.7 Servo motor with electromagnetic brake
CAUTION
Configure the electromagnetic brake operation circuit so that it is activated not only
by the interface unit signals but also by an external forced stop (EMG_
).
EMG_
Contacts must be open when
servo-on (SON ) is off, when an
trouble (ALM_ ) is present and
when an electromagnetic brake
interlock (MBR ).
Circuit must be
opened during
forced stop
(EMG_ ).
RA
24VDC
Electromagnetic brake
Servo motor
The electromagnetic brake is provided for holding purpose and must not be used
for ordinary braking.
Before performing the operation, be sure to confirm that the electromagnetic brake
operates properly.
POINT
Refer to the Servo Motor Instruction Manual for specifications such as the
power supply capacity and operation delay time of the electromagnetic
brake.
Note the following when the servo motor equipped with electromagnetic brake is used:
1) Using the MR Configurator (servo configuration software), make the electromagnetic brake
interlock (MBR
) valid.
2) Do not share the 24VDC interface power supply between the interface and electromagnetic
brake. Always use the power supply designed exclusively for the electromagnetic brake.
3) The brake will operate when the power (24VDC) switches off.
4) While the reset (RES
)
is on, the base circuit is shut off. When using the servo motor with a
vertical shaft, use the electromagnetic brake interlock (MBR
).
5) Switch off the servo-on (SON
)
command after the servo motor has stopped.
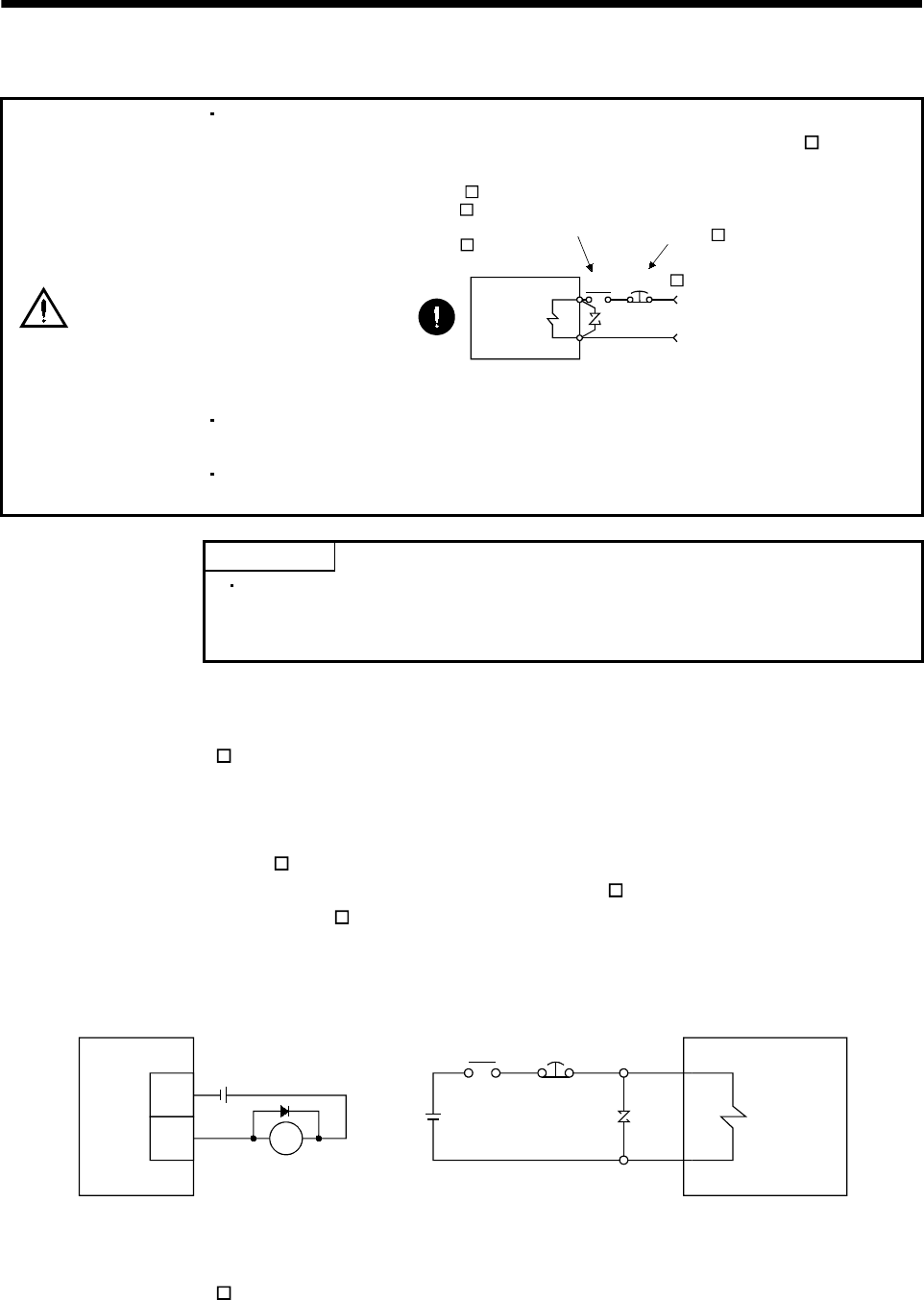
(1) Connection diagram
SG
RA
B2
B1
MBR
RA
Interface unit
or
extension IO unit
24VDC
Forced stop A
or
Forced stop B
24VDC
Servo motor
(2) Setting
1) Using the MR Configurator (servo configuration software), make the electromagnetic brake
interlock (MBR
) valid.
2) In DRU parameter No.33 (electromagnetic brake sequence output), set the delay time (Tb) from
electromagnetic brake operation to base circuit shut-off at a servo off time as in the timing chart
in (3) in this section.