


















3 - 30
3. SIGNALS AND WIRING
3.3.5 Detailed description of the device
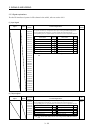
(1) Electronic gear switching
The combination of CM1
-SG and CM2 -SG gives you a choice of four different electronic gear
numerators set in the DRU parameters.
As soon as Electronic gear selection (CM1
)
/ Electronic gear selection 2 (CM2
)
is turned ON or
OFF, the denominator of the electronic gear changes. Therefore, if any shock occurs at this change, use
position smoothing (DRU parameter No. 7) to relieve shock.
(Note) External input signal
CM2 CM1
Electronic gear numerator
0 0 DRU parameter No. 3
0 1 DRU parameter No. 69
1 0 DRU parameter No. 70
1 1 DRU parameter No. 71
Note. 0: CM1 /CM2 -SG off(open)
1: CM1
/CM2 -SG on(short)
(2) Torque limit
CAUTION
Releasing the torque limit during servo lock may cause the servo motor to
suddenly rotate according to the position deviation from the instructed position.
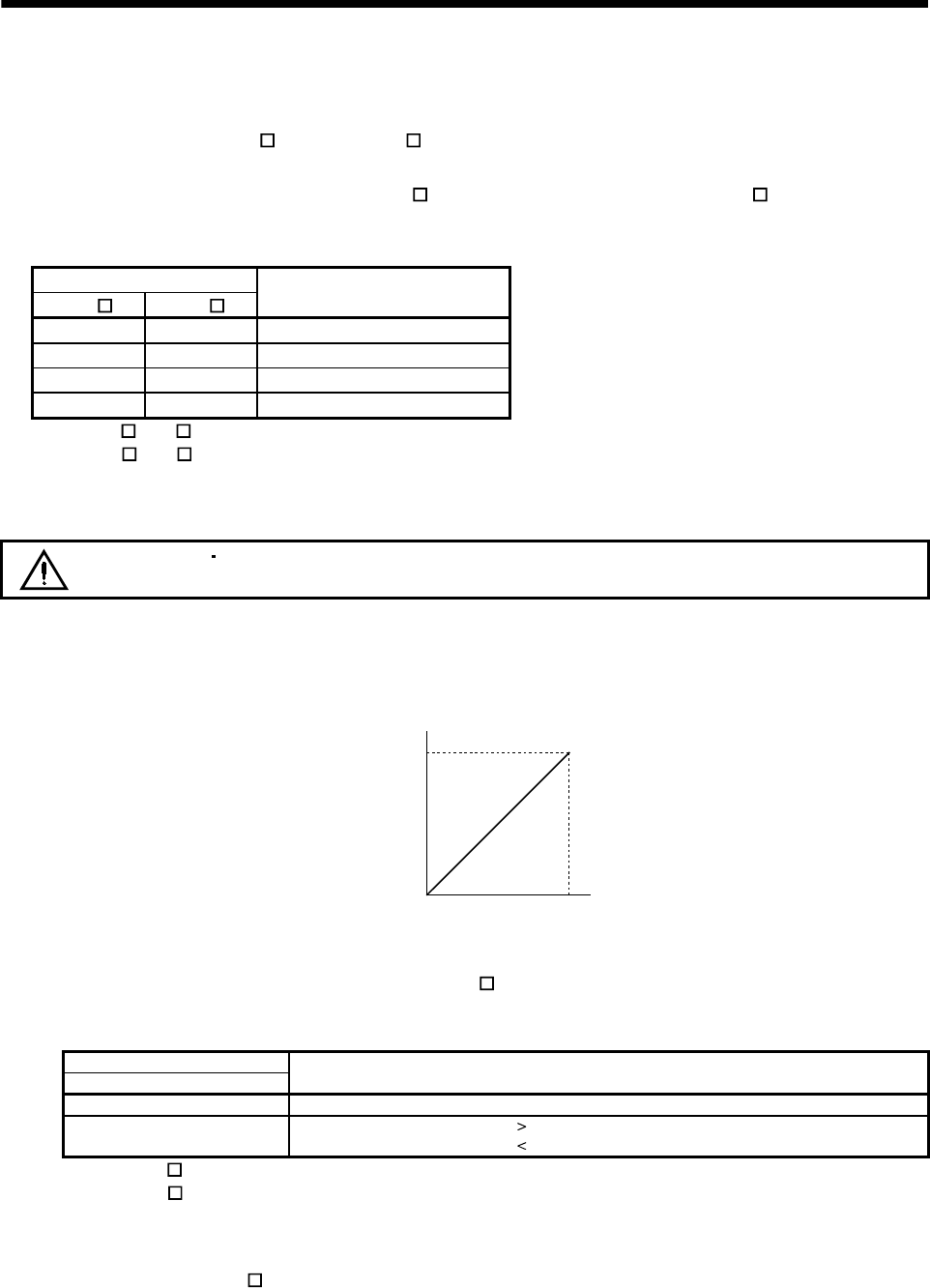
(a) Torque limit and torque
By setting DRU parameter No. 28 (internal torque limit 1), and DRU parameter No. 76 (internal
torque limit 2), torque is always limited to the maximum value during operation. A relationship
between the limit value and servo motor torque is shown below.
0
0 100
Max. torque
Generated torque
Torque limit value [%]
(b) Torque limit value selection
By making internal torque limit selection (TL1
) usable, you can select the torque limit value as
indicated below.
(Note 1) External input signals
TL1
(Note 2) Torque limit value made valid
0 Internal torque limit 1 (DRU parameter No. 28)
1
DRU parameter No. 76
DRU parameter No. 28: DRU parameter No. 28
DRU parameter No. 76
DRU parameter No. 28: DRU parameter No. 76
Note 1. 0: TL1 -SG off (open)
1: TL1
-SG on (short)
2. Releasing the torque limit during servo lock may cause the servo motor to suddenly rotate according to the position
deviation from the instructed position.
(c) Limiting torque (TLC )
TLC-SG are connected when the torque by the servo motor reaches the torque set to internal
torque limit 1 or internal torque limit 2.