



















4 - 15
4. OPERATION
(b) Incremental value command system
1) Point table
Set the point table values using the MR Configurator or the MR-PRU03 parameter unit.
Set the position data, motor speed, acceleration time constant, deceleration time constant, dwell,
auxiliary function and M code to the point table. The following table gives a setting example.
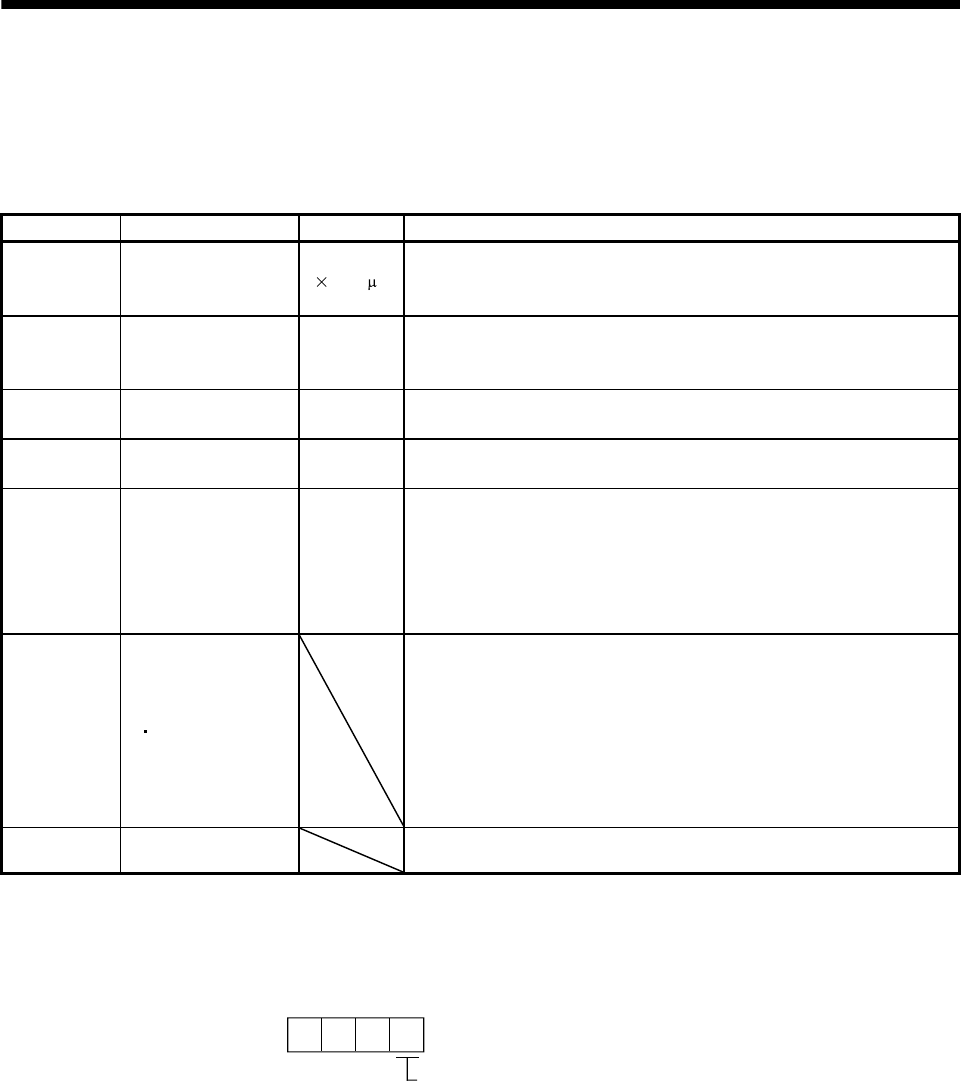
Name Setting range Unit Description
Position data 0 to 999999 10
STM
m
Set the moving distance.
The unit can be changed using feed length multiplication factor selection of
parameter No. PA05.
Servo motor
speed
0 to permissible speed r/min
Set the command speed of the servo motor for execution of positioning.
The setting should be equal to or less than the instantaneous permissible
speed of the servo motor.
Acceleration
time constant
0 to 20000 ms Set the time until the rated speed of the servo motor is reached.
Deceleration
time constant
0 to 20000 ms
Set the time until the servo motor running at rated speed comes to a stop.
Dwell 0 to 20000 ms
When the dwell is set, the position command of the selected point table is
completed, and after the set dwell has elapsed, the position command of the
next point table is started.
Set "0" in the auxiliary function to make the dwell invalid.
Set "1" in the auxiliary function and 0 in the dwell to perform speed change
operation.
Auxiliary
function
0
1
0: Automatic operation is performed in accordance with a single point table
chosen.
1: Operation is performed in accordance with consecutive point tables
without a stop.
When a different rotation direction is set, smoothing zero (command
output) is confirmed and the rotation direction is then reversed.
Setting "1" in point table No.255 results in an error.
For full information, refer to (2) in this section.
M code 00 to 99
The first and second digits of the M code respectively are output in 4-bit
binary.
2) Parameter setting
Set the following parameters to perform automatic operation.
Select the incremental value command system with parameter No.PA01 (Control mode).
1
Parameter No. PA01
Incremental value command system