



















4 - 42
4. OPERATION
4.7.5 Stopper type home position return
In stopper type home position return, a machine part is pressed against a stopper or the like by jog operation to
make a home position return and that position is defined as a home position.
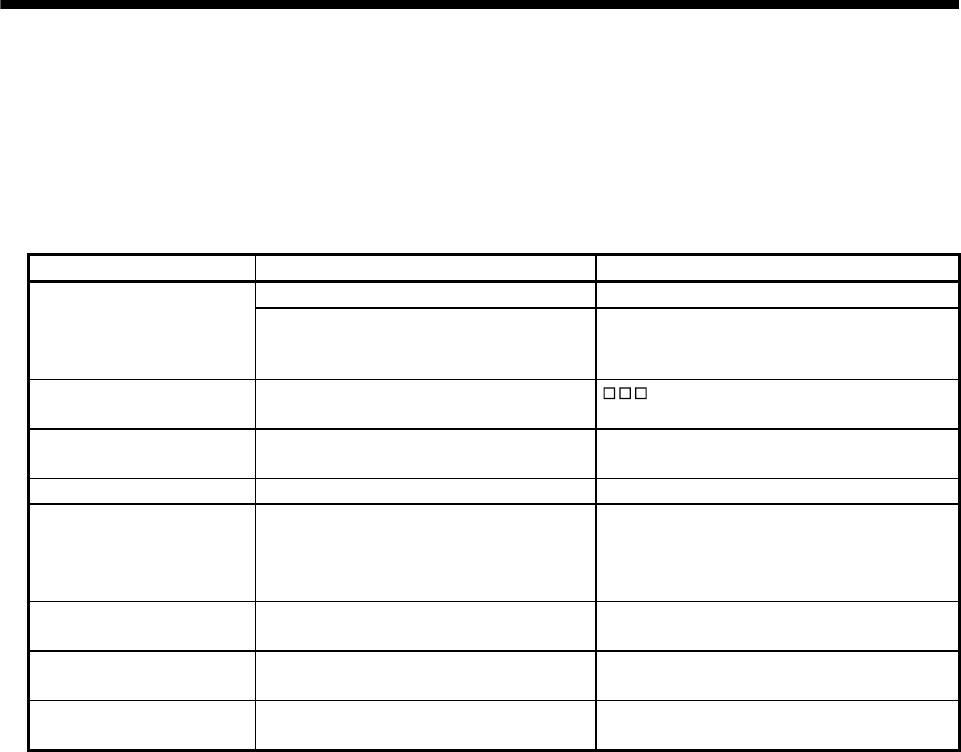
(1) Devices, parameters
Set the input devices and parameters as follows.
Item Device/Parameter used Description
Manual home position return
mode selection
Automatic/manual selection (MD0) Turn MD0 ON.
(Note)
Point table No. selection 1 to 8
(DI0 to DI7)
DI0 to DI7 are turned off.
Stopper type home position
return
Parameter No.PC02
3 : Stopper type home position return is
selected.
Home position return direction Parameter No.PC03
Refer to (2) in this section and choose the home
position return direction.
Home position return speed Parameter No.PC04 Set the speed till contact with the stopper.
Stopper time Parameter No.PC09
Time from when the part makes contact with the
stopper to when home position return data is
obtained to output home position return
completion (ZP).
Stopper type home position
return torque limit
Parameter No.PC10
Set the servo motor torque limit value for
execution of stopper type home position return.
Home position return
acceleration time constant
Point table No.1
Use the acceleration time constant of point table
No.1.
Home position return position
data
Parameter No.PC07
Set the current position at home position return
completion.
Note. This setting is for when the point table is used. When using the BCD input, turn SP0 to 3 OFF.