



















4 - 40
4. OPERATION
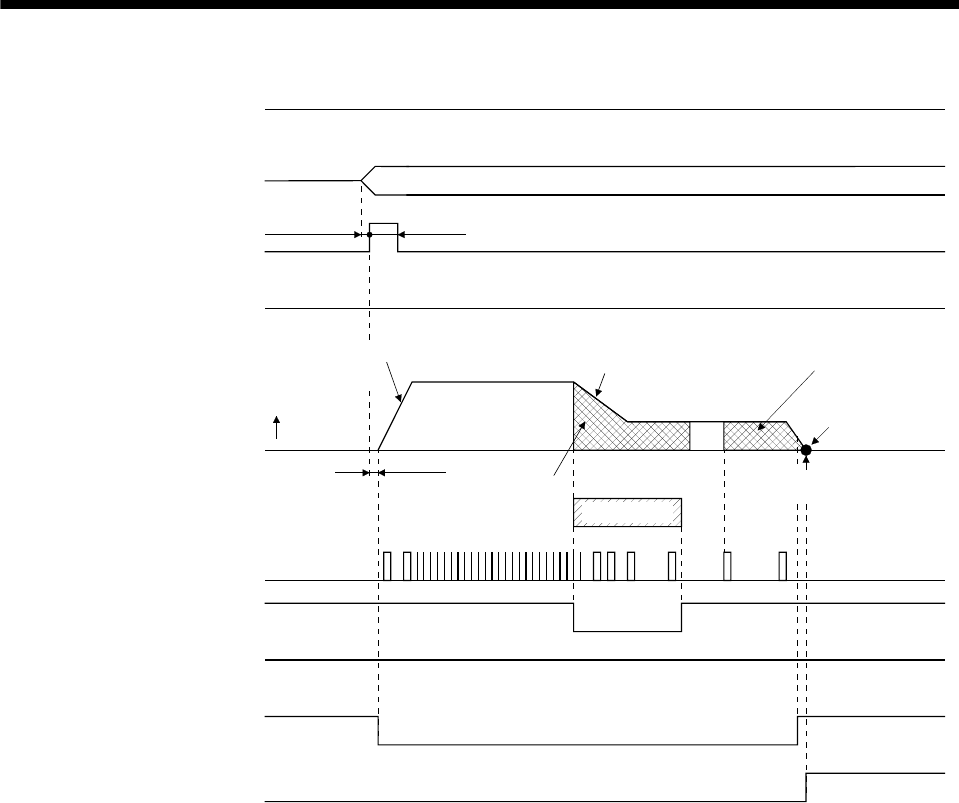
(2) Timing chart
(Note)
3ms or more
0r/min
Forward
rotation
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
0
ON
OFF
ON
OFF
Movement finish (MEND)
Rough match (CPO)
Home position return
completion (ZP)
Servo motor speed
Z-phase
Proximity dog (DOG)
Forward rotation start (ST1)
5ms or more
3ms or less
Home position
shift distance
Parameter No. PC06
Home position address
Parameter No. PC07
Home position return
speed Parameter No. PC04
Point table No. 1
Acceleration
time constant
Home position
Creep speed
Parameter No. PC05
Point table No. 1
Deceleration time
constant
Moving distance after
proximity dog
Parameter No. PC08
Reverse rotation start (ST2)
Selected point table No.
Automatic/manual selection
(MD0)
Proximity dog
Note. External input signal detection delays by the input filter setting time of parameter No. PD19. Also, make up a sequence that will
change the point table selection earlier by the time that takes into account the output signal sequence from the controller and the
variation of a signal change due to the hardware.
The parameter No.PC07 (home position return position data) setting value is the positioning address after
the home position return is completed.