

















5 - 45
5. PARAMETERS
Setting Output item Description Setting Output item Description
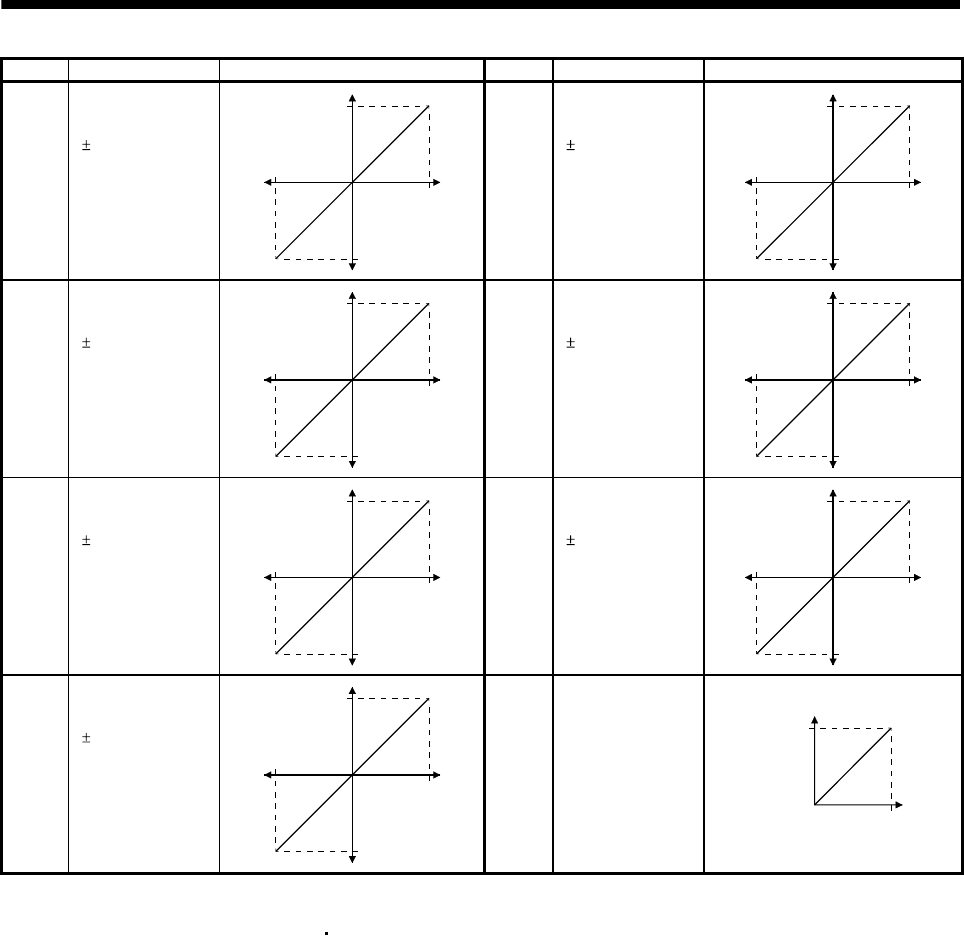
6 Droop pulses
(Note 1)
(
10V/100 pulses)
100[pulse]
CW direction
CCW direction
100[pulse]
0
10[V]
-10[V]
7 Droop pulses
(Note 1)
(
10V/1000
pulses)
1000[pulse]
CW direction
CCW direction
1000[pulse]
0
10[V]
-10[V]
8 Droop pulses
(Note 1)
(
10V/10000
pulses)
10000[pulse]
CW direction
CCW direction
10000[pulse]
0
10[V]
-10[V]
9 Droop pulses
(Note 1)
(
10V/100000
pulses)
100000[pulse]
CW direction
CCW direction
100000[pulse]
0
10[V]
-10[V]
A Feedback position
(Note 1)
(
10V/1 Mpulses)
1M[pulse]
CW direction
CCW direction
1M[pulse]
0
10[V]
-10[V]
B Feedback position
(Note 1)
(
10V/10 Mpulses)
10M[pulse]
CW direction
CCW direction
10M[pulse]
0
10[V]
-10[V]
C Feedback position
(Note 1)
(
10V/100
Mpulses)
100M[pulse]
CW direction
CCW direction
100M[pulse]
0
10[V]
-10[V]
D Bus voltage
(Note 3)
400[V]
0
8[V]
Note 1. Encoder pulse unit.
2. 8V is outputted at the maximum torque.
However, when parameter No. PA11
PA12 are set to limit torque, 8V is outputted at the torque highly limited.
3. For 400V class servo amplifier, the busvoltage becomes +8V/800V.