



















3 - 45
3. CC-LINK COMMUNICATION FUNCTIONS
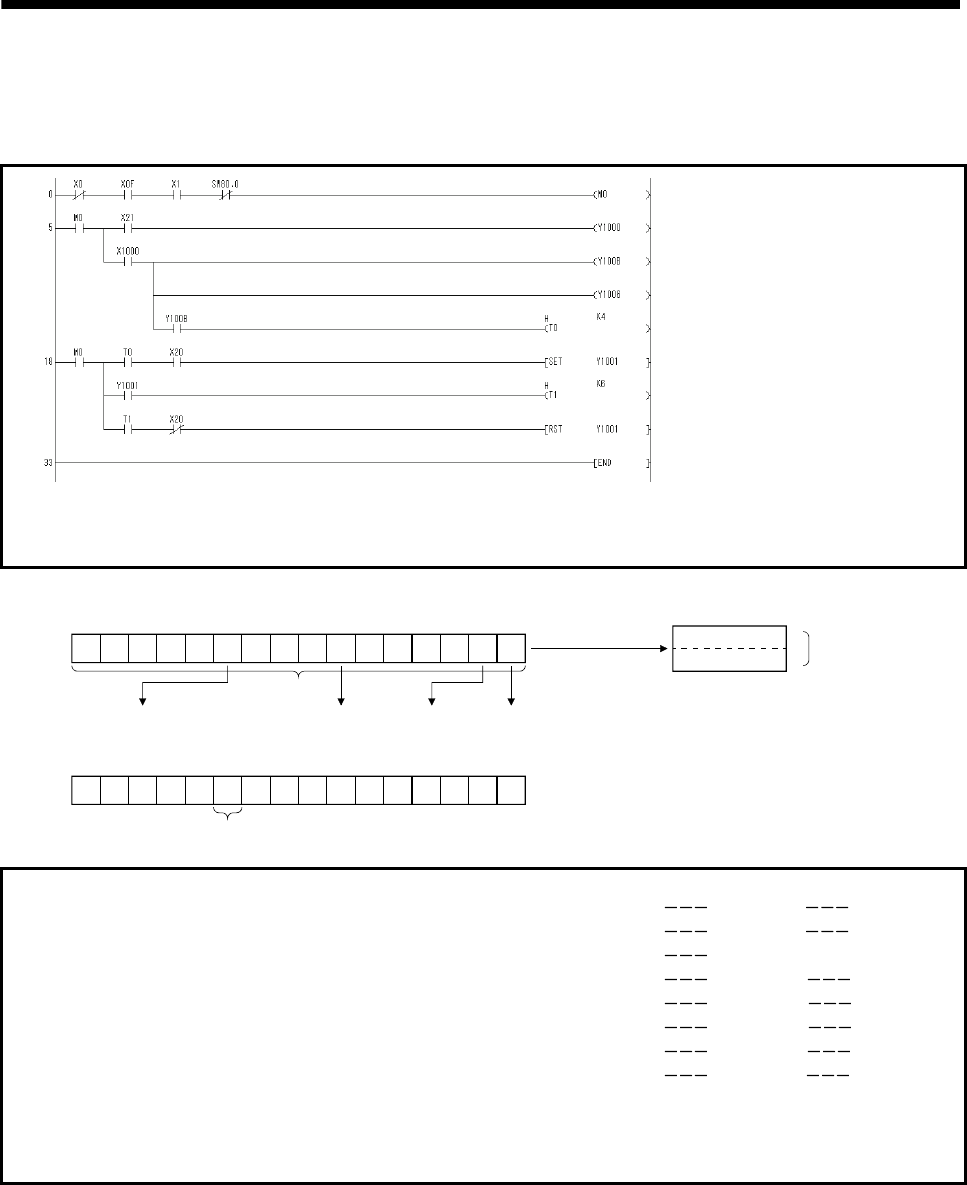
3.7.3 Writing the operation commands
Perform positioning operation of point table No.2 for the servo amplifier of station 2.
Start the operation by turning on X20.
*1: This is when the high-speed timer limit is set to 1ms.
Setting time for the timer should be larger than the command processing
time or twice the link scan time whichever larger. When the setting time
is short, the command cannot be received properly.
Checks data link status of station No.1.
Servo-on command (RY00)
Point table No. selection command (bit1) (RY0B)
Point table establishment time 4ms *1
Automatic/manual selection command (RY06)
Forward rotation start command (RY01)
Command demand time 6ms *1
Forward rotation start command reset
Operation command
Servo-on command
*0*
Y101F
b15
b10 b5
Y1010
b0
0000010001110011
Y100F
b15
b10 b5
Y1000
b0
[Operation command]
*** **** ****
*
RY0F to RY00
RY1F to RY10
Remote input
Station No.1
*: Set 0 as the bit is not used.
*
Point table
selection (bit1)
Automatic/manual
selection
Forward
rotation start
Servo-on
1: ON
0: OFF
[Operation command]
Operation commands
(1 station occupied)
Y1000: Servo-on (SON)
Y1001: Forward rotation start (ST1)
Y1002: Reverse rotation start (ST2)
Y1003: Proximity dog (DOG)
Y1004: Forward rotation stroke end
(LSP)
Y1005: Reverse rotation stroke end
(LSN)
Y1006: Automatic/manual selection
(MDO)
Y1007: Temporary stop/Restart (TSTP)
Y1008: Monitor output execution demand
(MOR)
Y1009: Instruction code execution
demand (COR)
Y100A: Point table No. selection 1 (DI0)
Y100B: Point table No. selection 2 (DI1)
Y100C: Point table No. selection 3 (DI2)
Y100D: Point table No. selection 4 (DI3)
Y100E: Point table No. selection 5 (DI4)
Y100F: Clear (CR)
Y1010:
Y1011:
Y1012:
Y1013:
Y1014:
Y1015:
Y1016:
Y1017:
Y1018:
Y1019:
Y101A: Reset (RES)
Y101B:
Y101C:
Y101D:
Y101E:
Y101F: