



















5 - 45
5. OPERATION
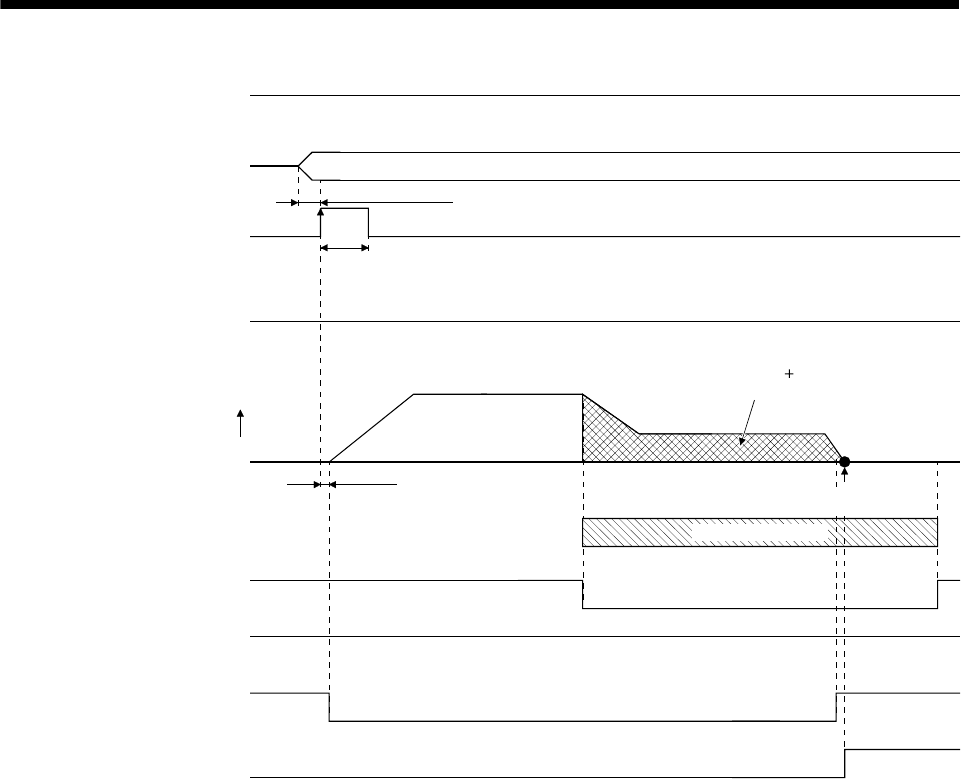
(2) Timing chart
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
Automatic/manual selection
(RYn6)
Rough match (RXn2)
Servo motor speed
Proximity dog (DOG)
Forward rotation start (RYn1)
Home position return speed
Creep speed
Moving distance after proximity dog
Home position shift distance
6ms or more
3ms or less
Reverse rotation start (RYn2)
Selected point table No.
Forward
rotation
0r/min
0
4ms or more (Note)
Proximity dog (DOG)
Home position address
parameter No.PC07
Movement completion (RXnC)
Home position return
completion (RXn3/ZP)
Note. Configure a sequence that changes the point table selection earlier, considering the delay time of CC-Link communication.
The parameter No.PC07 (home position return position data) setting value is the positioning address after
the home position return is completed.