



















8 - 16
8. PARAMETER UNIT (MR-PRU03)
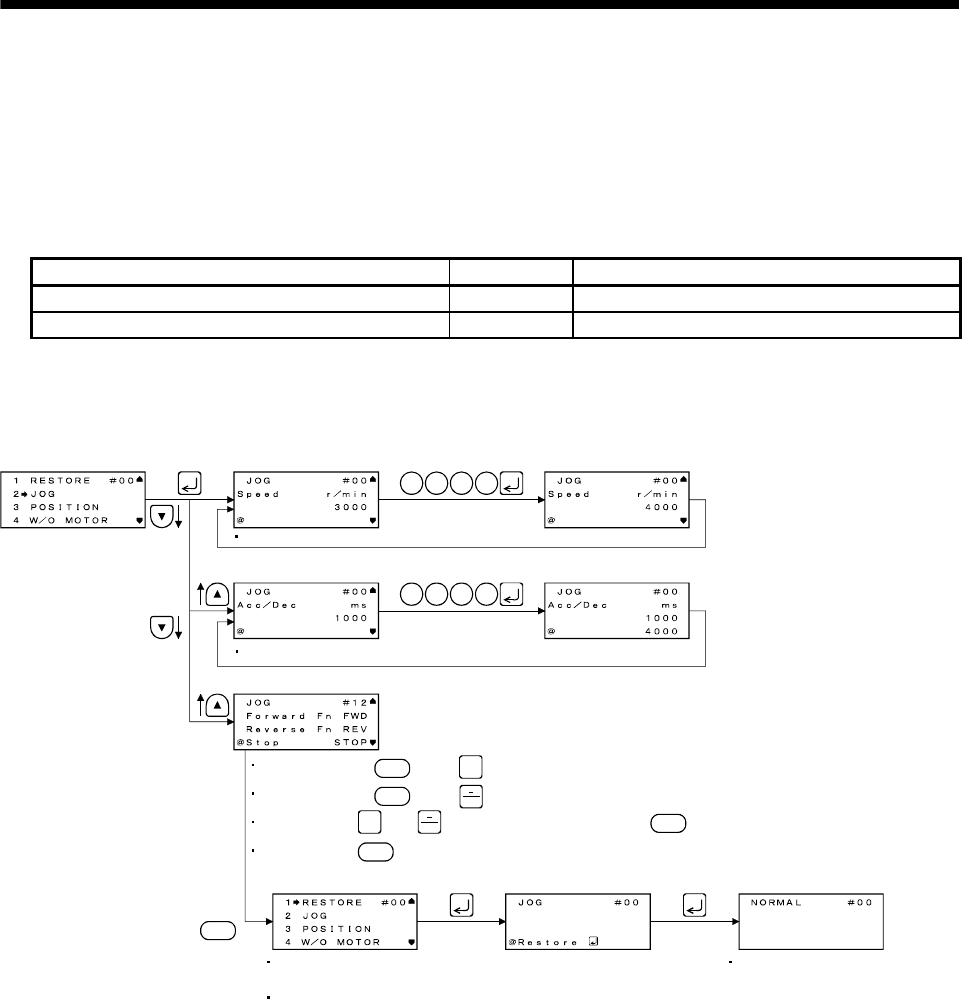
(1) Jog operation
Jog operation can be performed when there is no command from the external command device.
Connect EMG-DOCOM to start jog operation.
(a) Operation/cancel
You can change the operation conditions with the parameter unit. The initial conditions and setting
ranges for operation are listed below.
Item Initial setting Setting range
Speed [r/min] 200 0 to instantaneous permissible speed
(Note) Acceleration/deceleration time constant [ms] 1000 0 to 20000
Note. Acceleration time constant refers to time required to reach the rated speed from stop status (0r/min), and deceleration time
constant refers to time required to reach 0r/min from the rated speed.
The following shows the operation condition settings and the operation procedures.
Test operation mode has
been canceled.
Servo motor speed
Servo motor speed in JOG operation is displayed.
Operation screen
Acceleration/deceleration
time constant
Acceleration/deceleration time constant in JOG operation is displayed.
4 0 0
e.g. 4000r/min is set
0
4 0 0
e.g. 4000ms is set
0
Fn
FWD
REV
This screen is also displayed
when "RESTORE" is selected
in the initial screen of the test
operation mode with no test
operation being performed.
Returns to the initial screen
of the test operation mode.
Select "RESTORE".
Test operation mode cancel
ESC
JOG operation
Hold down the " " and " " keys to run the servo motor in the forward rotation direction.
Hold down the " " and " " keys to run the servo motor in the reverse rotation direction.
Take off the " " or " " key while holding down the " " key to stop.
Take off the " " key to stop immediately.
Fn
FWD
Fn
Fn
REV
If the parameter unit cable is disconnected during jog operation, the servo motor will be decelerated to a
stop.
To switch from the test operation mode to the CC-Link operation mode, turn OFF the power of the servo
amplifier.
(b) Status display
You can monitor the status display even during JOG operation. At this time, the "FWD", "REV" and
"STOP" keys can be used.