



















4 - 6
4. SIGNALS AND WIRING
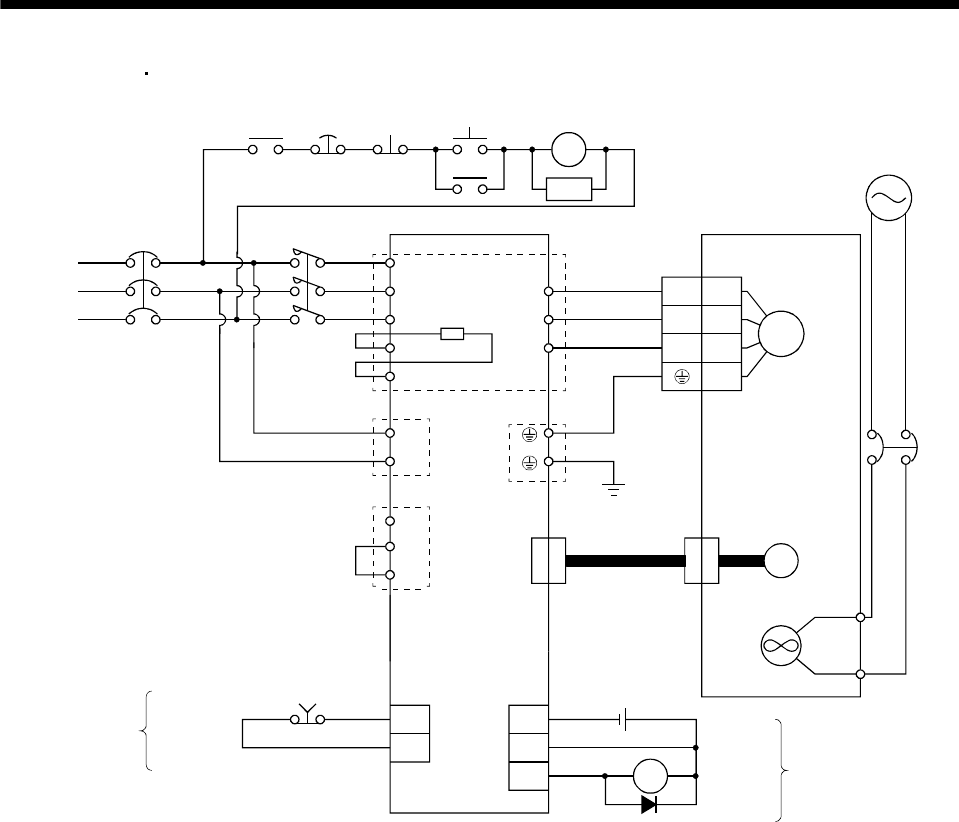
(5) MR-J3-500T
MR-J3-700T
EMG
NFB MC
L
1
L
2
L
3
3-phase
200 to
230VAC
Servo amplifier
ALM RA
C
DICOM
DOCOM
P
U
V
W
TE1
PE
L
11
L
21
TE2
Servo motor
U
V
W
2
3
4
1
M
Motor
Encoder
CN2
24VDC
(Note 3)
Encoder cable
(Note 5)
Trouble
DOCOM
Forced stop
P1
P
2
N
TE3
CN6 CN6
(Note 1)
(Note 2)
Built-in
regenerative
resistor
(Note 4)
(Note 4)
Forced
stop
RA
SK
MC
ON
OFF
MC
Cooling fan
(Note 6)
Power supply
of cooling fan
BU
BV
NFB
Note 1. Always connect P1 and P2. (Factory-wired.) When using the power factor improving DC reactor, refer to section 14.11.
2. Always connect P and D. (Factory-wired.) When using the regenerative option, refer to section 14.2.
3. For encoder cable, use of the option cable is recommended. Refer to section 14.1 for selection of the cable.
4. For the sink I/O interface. For the source I/O interface, refer to section 4.8.3.
5. Refer to section 4.10.
6. A cooling fan is attached to the HA-LP601 and the HA-LP701M servo motors. For power supply specification of the cooling fan,
refer to section 4.10.2 (3) (b).