



















5 - 27
5. OPERATION
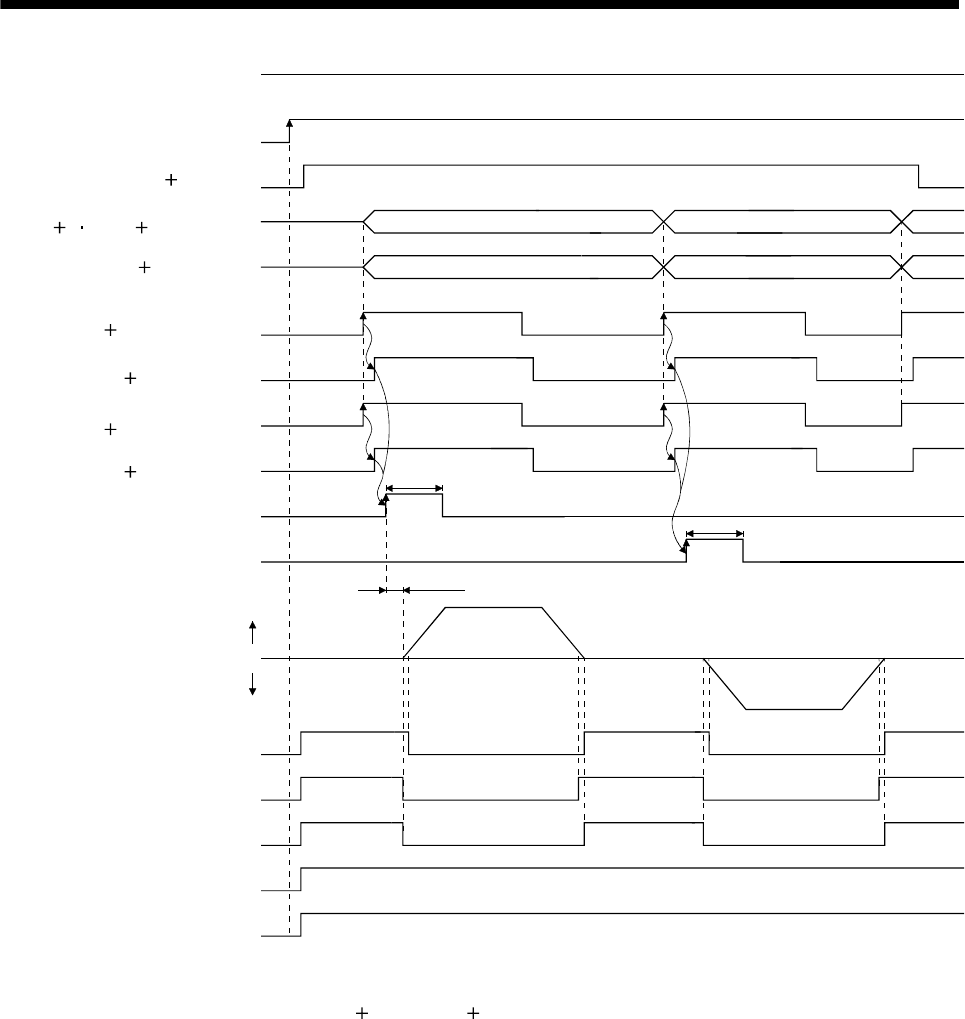
Forward
rotation
0r/min
Reverse
rotation
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
Reverse rotation start
(RYn2)
ON
OFF
ON
OFF
ON
OFF
ON
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
Speed data 2Speed data 1
Position data 2Position data 1
3ms or less
Incremental
value data 1
Incremental
value data 2
6ms or more
(Note 1)
6ms or more
(Note 1)
Servo-on (RYn0)
A
utomatic/manual selection
(RYn6)
Speed data (RWwn 6)
Position data
(RWwn 4 RWwn 5)
Position/speed specifying
system selection (RY(n 2)A)
Ready (RD)
Trouble (ALM)
In position (RXn1)
Rough match (RXn2)
Servo motor speed
Forward rotation start (RYn1)
(Note 2)
Position instruction execution
demand (RY(n 2)0)
(Note 2)
Speed instruction execution
demand (RY(n 2)1)
Position instruction execution
completion (RX(n 2)0)
Speed instruction execution
completion (RX(n 2)1)
Movement completion (RXnC)
Note 1. Configure a sequence that changes the point table selection earlier, considering the delay time of CC-Link communication.
2. For details of the operation timing of RY(n
2)0 and RY(n 2)1, refer to the section 3.6.2 (3).