

















16 - 21
16. INDEXER POSITIONING OPERATION
Code No. Item
Writing data (RWwn
3) contents
(Programmable controller
Servo amplifier)
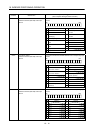
8701h
to
87FFh
Acceleration time constant data RAM
command of point table
Writes the acceleration time constants of point
table No.1 to 255 to RAM. These values are
cleared when power is switched off.
The decimal value converted from the 2 lower
digits of the code No. corresponds to the point
table No.
Convert the values into hexadecimal before setting.
8801h
to
88FFh
Deceleration time constant data RAM
command of point table
Writes the deceleration time constants of
point table No.1 to 255 to RAM. These values
are cleared when power is switched off.
The decimal value converted from the 2 lower
digits of the code No. corresponds to the point
table No.
Convert the values into hexadecimal before setting.
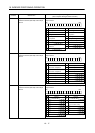
8D01h
to
8DFFh
Servo motor speed data EEP-ROM command
of point table
Writes the servo motor speeds of point table
No.1 to 255 to EEP-ROM. Written to EEP-
ROM, these values are held if power is
switched off.
The decimal value converted from the 2 lower
digits of the code No. corresponds to the point
table No.
Convert the values into hexadecimal before setting.
8E01h
to
8EFFh
Acceleration time constant data EEP-ROM
command of point table
Writes the acceleration time constants of point
table No.1 to 255 to EEP-ROM. Written to
EEP-ROM, these values are held if power is
switched off.
The decimal value converted from the 2 lower
digits of the code No. corresponds to the point
table No.
Convert the values into hexadecimal before setting.
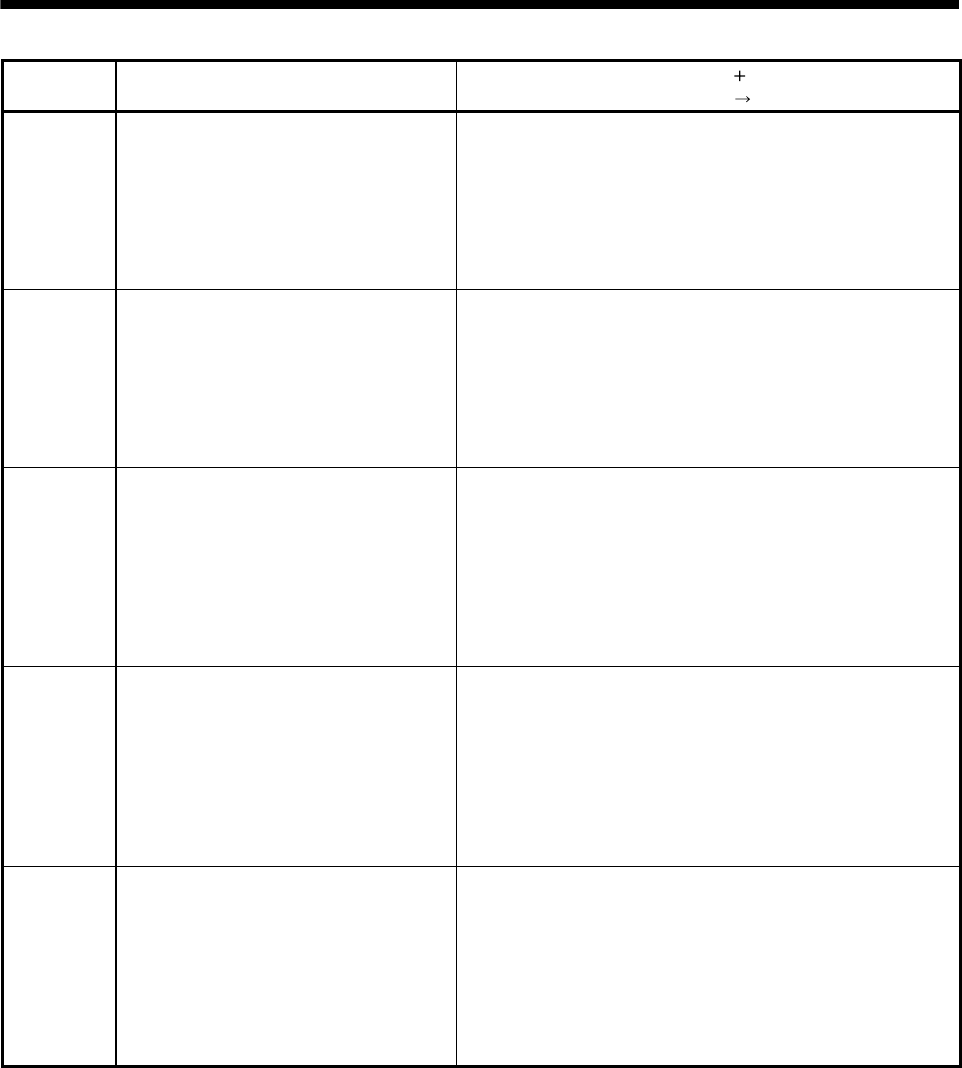
8F01h
to
8FFFh
Deceleration time constant data EEP-ROM
command of point table
Writes the deceleration time constants of
point table No.1 to 255 to EEP-ROM. Written
to EEP-ROM, these values are held if power
is switched off.
The decimal value converted from the 2 lower
digits of the code No. corresponds to the point
table No.
Convert the values into hexadecimal before setting.