
















1 - 29
1. FUNCTIONS AND CONFIGURATION
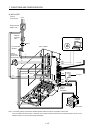
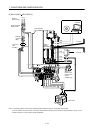
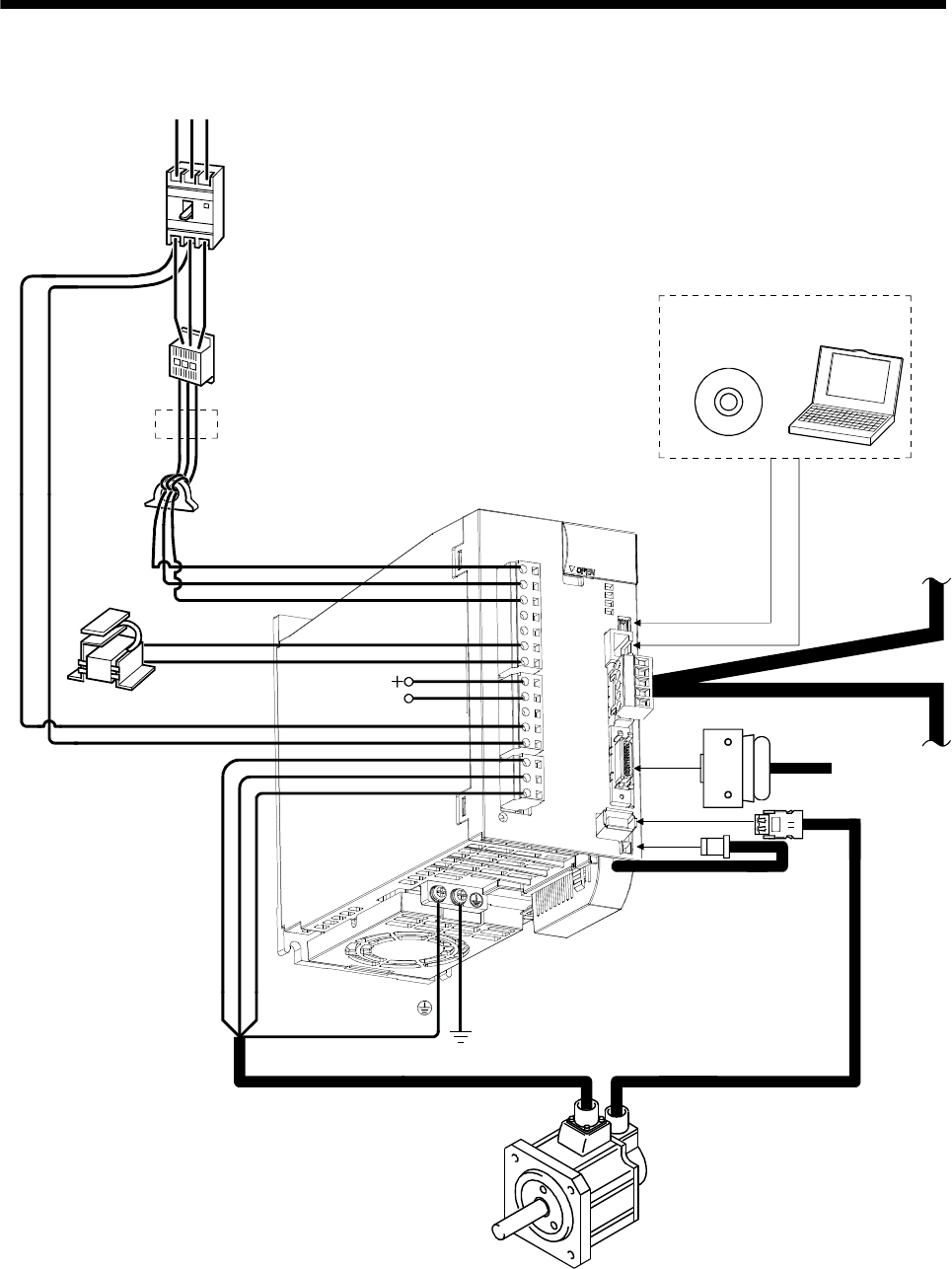
(3) MR-J3-200T(4)
Servo amplifier
(Note 1)
Battery
MR-J3BAT
(Note 3)
Power supply
No-fuse breaker
(NFB) or fuse
MR Configurator
I/O signal
Magnetic
contactor
(MC)
(Note 2)
Power factor
improving
DC reactor
(FR-BEL/
FR-BEL-H)
Regenerative
option
Servo motor
Personal
computer
(Note 2)
Line noise filter
(FR-BSF01)
R S T
P
1
P
2
UVW
CN2
CN4
L1
L
2
L3
P
C
L
11
L22
CN5
CN3
CN6
CC-Link
CN1
(Note 4)
Note 1. The battery (option) is used for the absolute position detection system in the position control mode.
2. The AC reactor can also be used. In this case, the DC reactor cannot be used. When not using DC reactor, short P
1 and P2.
3. Refer to section 1.2 for the power supply specification.
4. Connectors (CNP1, CNP2, and CNP3) and appearance of MR-J3-200T servo amplifier have been changed from January 2008
production. Model name of the existing servo amplifier is changed to MR-J3-200T-RT. For MR-J3-200T-RT, refer to appendix 5.