



















5 - 22
5. OPERATION
5.4.3 Remote register-based position/speed setting
This operation can be used when 2 stations are occupied. This section explains operation to be performed
when the remote register is used to specify the position command data/speed command data.
(1) Absolute value command positioning in absolute value command system
The position data set in the absolute value command system are used as absolute values in positioning.
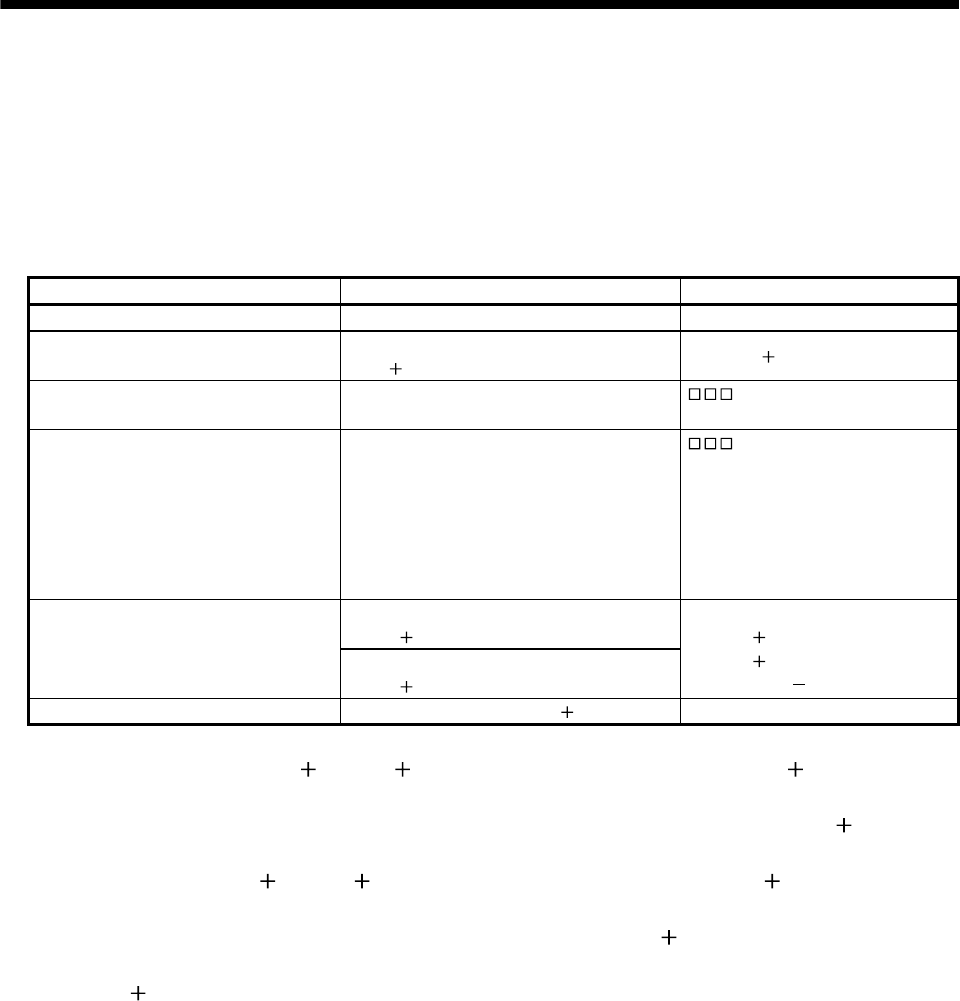
Set the input devices and parameters as indicated below.
Item Used device/parameter Description
Automatic operation mode Automatic/manual selection (RYn6) Turn RYn6 ON.
Remote register-based position/speed
setting
Position/speed specifying system selection
(RY(n
2)A)
Turn RY(n
2)A ON.
Command system Parameter No.PA01
0 : Absolute value command
system is selected.
Remote register-based position/speed
specifying system selection
Parameter No.PC30
2 : Remote register-based
position/speed specifying
system is selected. In the
case, always set an
acceleration/deceleration
time constant in the point
table No.1.
Position command data lower 16 bit
(RWwn
4)
Position data
Position command data upper 16 bit
(RWwn
5)
Set the lower 16 bits of position data
to RWwn
4, and the upper 16 bits
to RWwn
5.
Setting range:
999999 to 999999
Servo motor speed Speed command data (RWwn 6) Set the servo motor speed.
Set the position data to RWwn
4/RWwn 5, and the speed command data to RWwn 6, and store them
into the servo amplifier.
In the absolute value command system, Absolute value/incremental value selection (RY(n
2)B) can be
used to select whether the values set to the position data are absolute values or incremental values. The
position data set to RWwn
4/RWwn 5 are handled as absolute values when RY(n 2)B is turned OFF or
as incremental values when it is turned ON. During operation, how the position data will be handled
(absolute values or incremental values) depends on the status of RY(n
2)B when Forward rotation start
(RYn1) is turned ON.
Here, RY(n
2)B is turned OFF since the position data are handled as absolute values.