



















15 - 32
15. COMMUNICATION FUNCTION
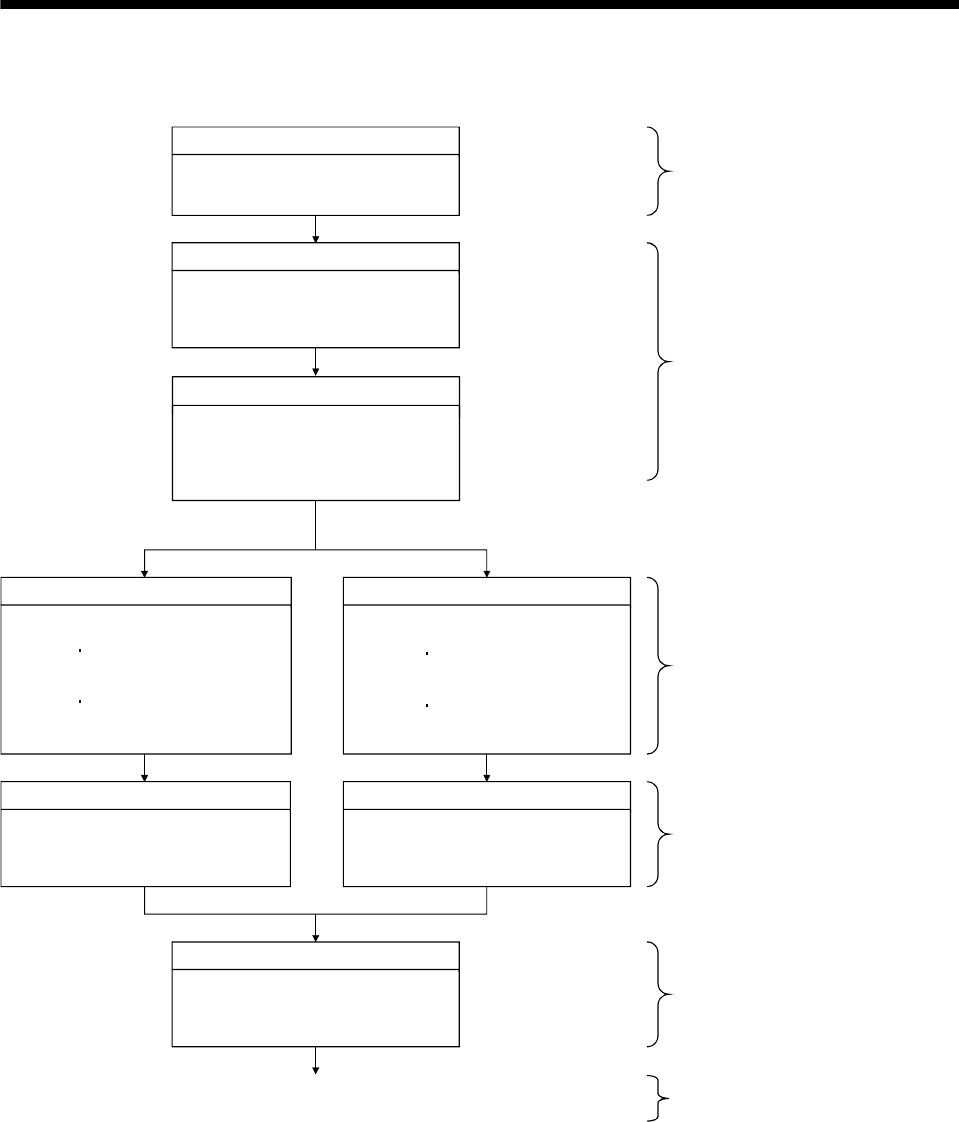
(2) JOG operation
Send the command, data No. and data as indicated below to execute JOG operation.
Command : [8][B]
Data No. : [0][0]
Data : 0001(JOG operation)
When LSP/LSN was turned OFF by
external input signal or automatically
Command: [9][2]
Data No. : [0][0]
Data : Forward rotation direction
00000801
(SON, ST1 turned ON)
Reverse rotation direction
00001001
(SON, ST2 turned ON)
Start Start
Command : [9][2]
Data No. : [0][0]
Data : 00000007
(SON, LSP, LSN turned ON)
Command : [9][2]
Data No. : [0][0]
Data : 00000001
(SON turned ON)
Command : [8][B]
Data No. : [0][0]
Data : 0000
(JOG operation cancel)
Stop Stop
End
Command : [A][0]
Data No. : [1][1]
Data : Write the acceleration/
deceleration
time constant
[ms] in hexadecimal.
When LSP/LSN was turned OFF by
external input signal
Acceleration/deceleration time
constant setting
Command : [A][0]
Data No. : [1][0]
Data : Write the speed [r/min] in
hexadecimal.
Servo motor speed setting
Start
Select the JOG operation in the test
operation mode.
Set the operation pattern.
Start.
Stop.
Cancel the JOG operation.
Command : [9][2]
Data No. : [0][0]
Data : Forward rotation direction
00000807
(SON, LSP, LSN, ST1 turned ON)
Reverse rotation direction
00001007
(SON, LSP, LSN, ST2 turned ON)
Power on the servo amplifier.
Shift to the CC-Link operation mode.