


















3 - 12
3. CC-LINK COMMUNICATION FUNCTIONS
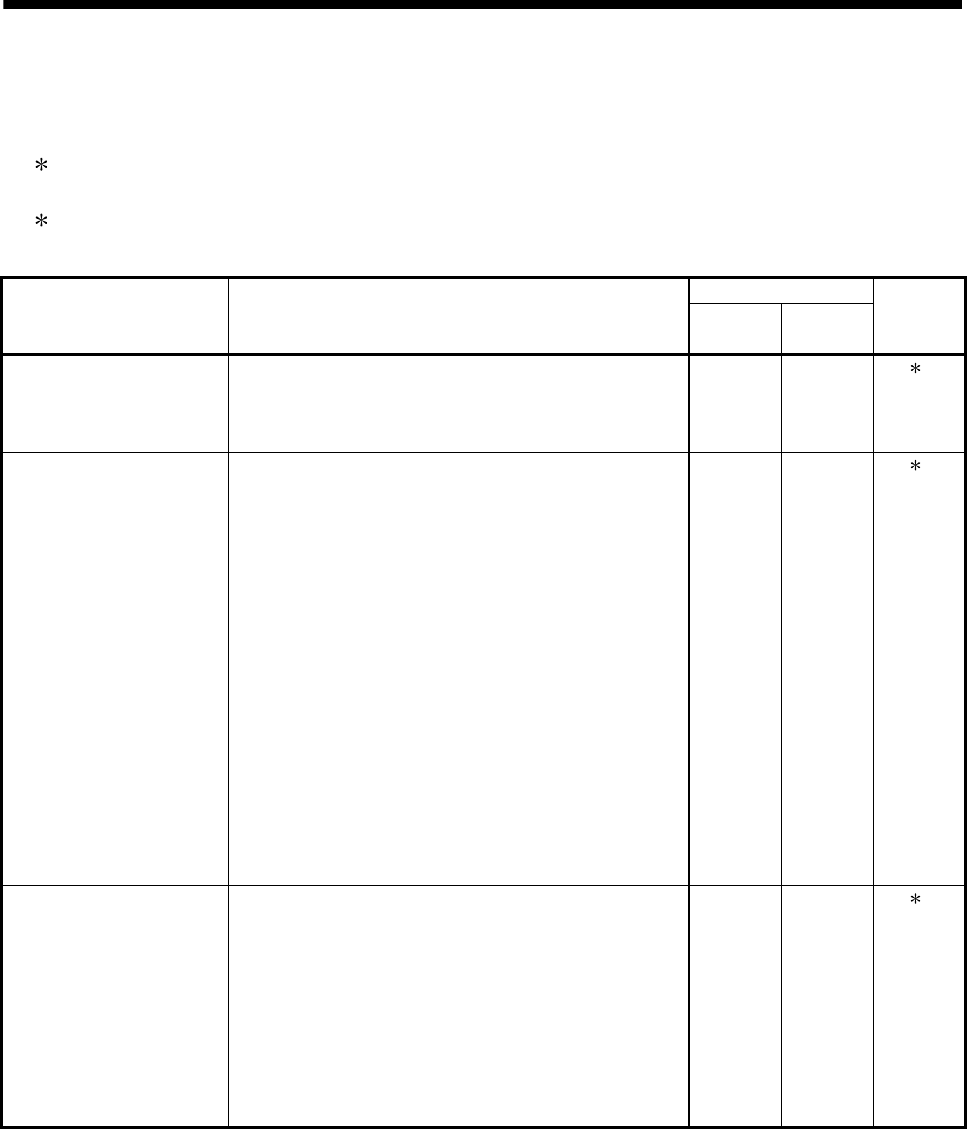
3.5.2 Detailed explanation of I/O signals
(1) Input signals (Input devices)
The note signs in the remarks column indicates the following descriptions.
1: Can be used as external input signals of CN6 connector by setting parameters No.PD06 to PD08 and
parameter No.PD12 PD14.
2: Can be automatic turned ON internally by setting parameters No.PD01 PD04.
The device whose Device No. field has an oblique line cannot be used in CC-Link.
Device No.
Signal name
(Device name)
Description
1 station
occupied
2 stations
occupied
Remarks
Servo-on Turning RYn0 ON powers on the base circuit, making
operation ready to start. (Servo on status)
Turning it OFF powers off the base circuit, coasting the servo
motor. (Servo off status)
RYn0 RYn0
1
Forward rotation start 1. In absolute value command system
Turning RYn1 ON for automatic operation executes
positioning once on the basis of the position data set to the
point table.
Turning RYn1 ON for a home position return immediately
starts a home position return.
Keeping RYn1 ON for JOG operation performs rotation in
the forward rotation direction.
Forward rotation indicates the address increasing direction.
2. In incremental value command system
Turning RYn1 ON for automatic operation executes
positioning once in the forward rotation direction on the basis
of the position data set to the point table.
Turning RYn1 ON for a home position return immediately
starts a home position return.
Keeping RYn1 ON for JOG operation performs rotation in
the forward rotation direction.
Forward rotation indicates the address increasing direction.
RYn1 RYn1
1
Reverse rotation start Use this device in the incremental value command system.
Turning RYn2 ON for automatic operation executes positioning
once in the reverse rotation direction on the basis of the
position data set to the point table.
Keeping RYn2 ON for JOG operation performs rotation in the
reverse rotation direction.
Reverse rotation indicates the address decreasing direction.
Reverse rotation start (RYn2) is also used as the start signal of
the high-speed automatic positioning function to the home
position.
RYn2 RYn2
1