



















16 - 41
16. INDEXER POSITIONING OPERATION
Select the point table using the speed selection 1 (RY(n
2)C) to speed selection 3 (RY(n 2)E). Turn
on the start (RYn1) to execute positioning with the speed data set in the point table. Rotation direction of
the servo motor is the direction set in the rotation direction specifying (RYn2). When one station is
occupied, RY(n
2)C, RY(n 2)D, and RY(n 2)E are not available so that the point table number
cannot be selected. Use point table No.1 when one station is occupied.
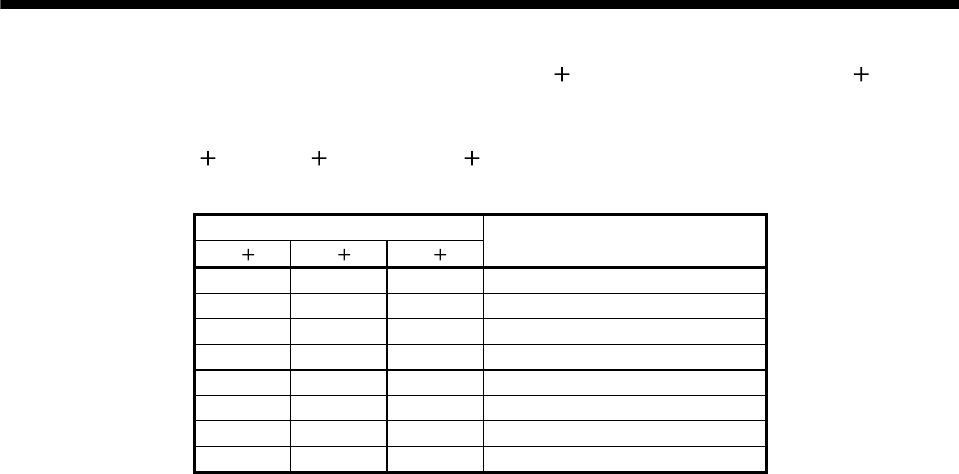
(Note) Device
RY(n 2)E RY(n 2)D RY(n 2)C
Point table No.
0 0 0 1
0 0 1 2
0 1 0 3
0 1 1 4
1 0 0 5
1 0 1 6
1 1 0 7
1 1 1 8
Note. 0: OFF
1: ON