



















5 - 38
5. OPERATION
5.6.4 Data setting type home position return
Data setting type home position return is used when it is desired to determine any position as a home position.
JOG operation can be used for movement.
(1) Devices, parameters
Set the input devices and parameters as follows.
Item Device/Parameter used Description
Automatic/manual selection (RYn6) Turn RYn6 ON.
Manual home position return mode
selection
Point table No. selection 1 to 8
(RYnA to RYnE, RY(n
2)3 to RY(n 2)5)
RYnA to RYnE, RY(n
2)3 to
RY(n
2)5 are turned off.
Remote register-based
position/speed setting
(Only when two stations are
occupied)
Position/speed specifying system selection
(RY(n
2)A)
Turn RY(n
2)A ON.
Data setting type home position
return
Parameter No.PC02
2 : Data setting type home
position return is selected.
Home position return position data Parameter No.PC07
Set the current position at home
position return completion.
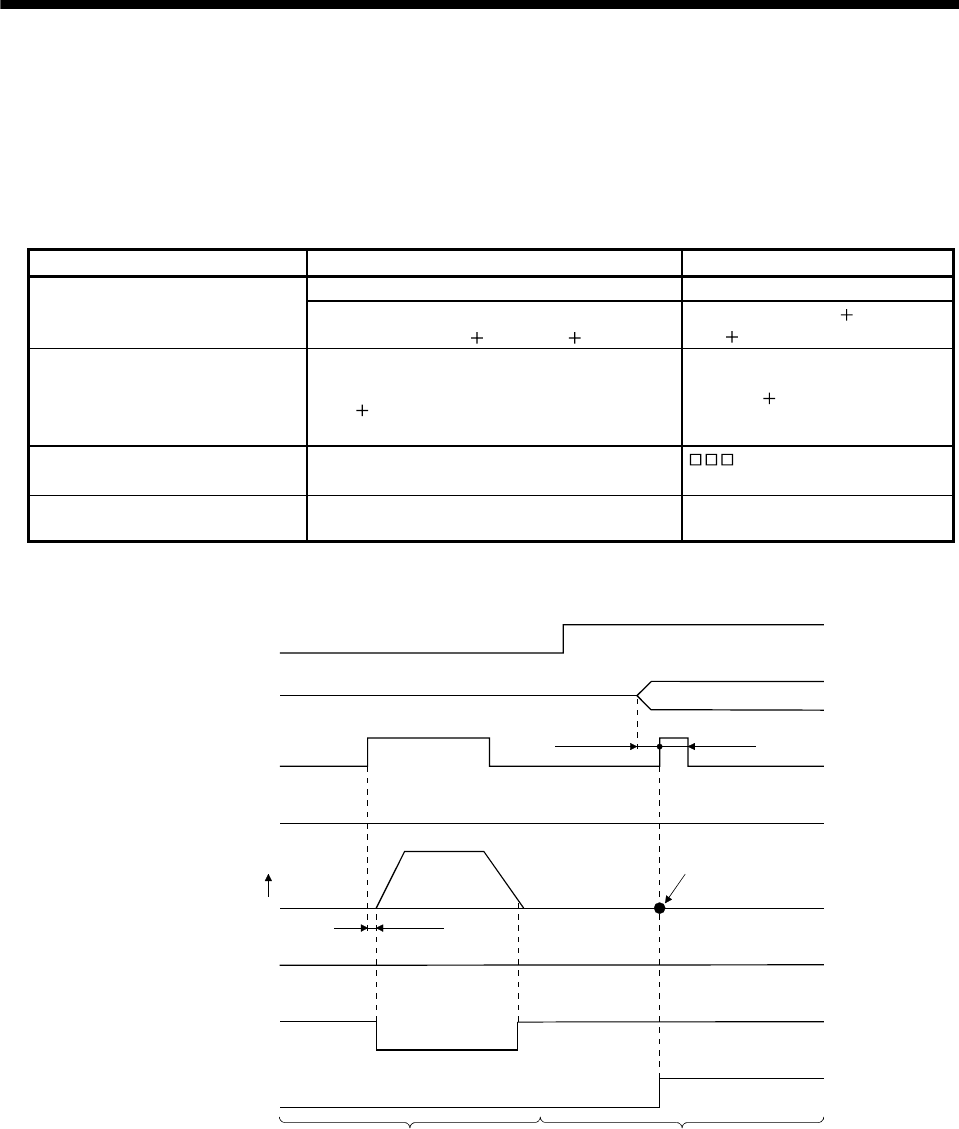
(2) Timing chart
ON
OFF
ON
OFF
ON
OFF
0
ON
OFF
ON
OFF
ON
OFF
Movement to the home position Operation for home position return
Rough match (RXn2)
Servo motor speed
Forward rotation start (RYn1)
3ms or less
Automatic/manual selection
(RYn6)
6ms or more
Reverse rotation start (RYn2)
0r/min
Forward
rotation
Selected point table No.
(Note)
4ms or more
Home position address
parameter No.PC07
Movement completion (RXnC)
Home position return
completion (RXn3/ZP)
Note. Configure a sequence that changes the point table selection earlier, considering the delay time of CC-Link communication.
The parameter No.PC07 (home position return position data) setting value is the positioning address after
the home position return is completed.