



















3 - 59
3. CC-LINK COMMUNICATION FUNCTIONS
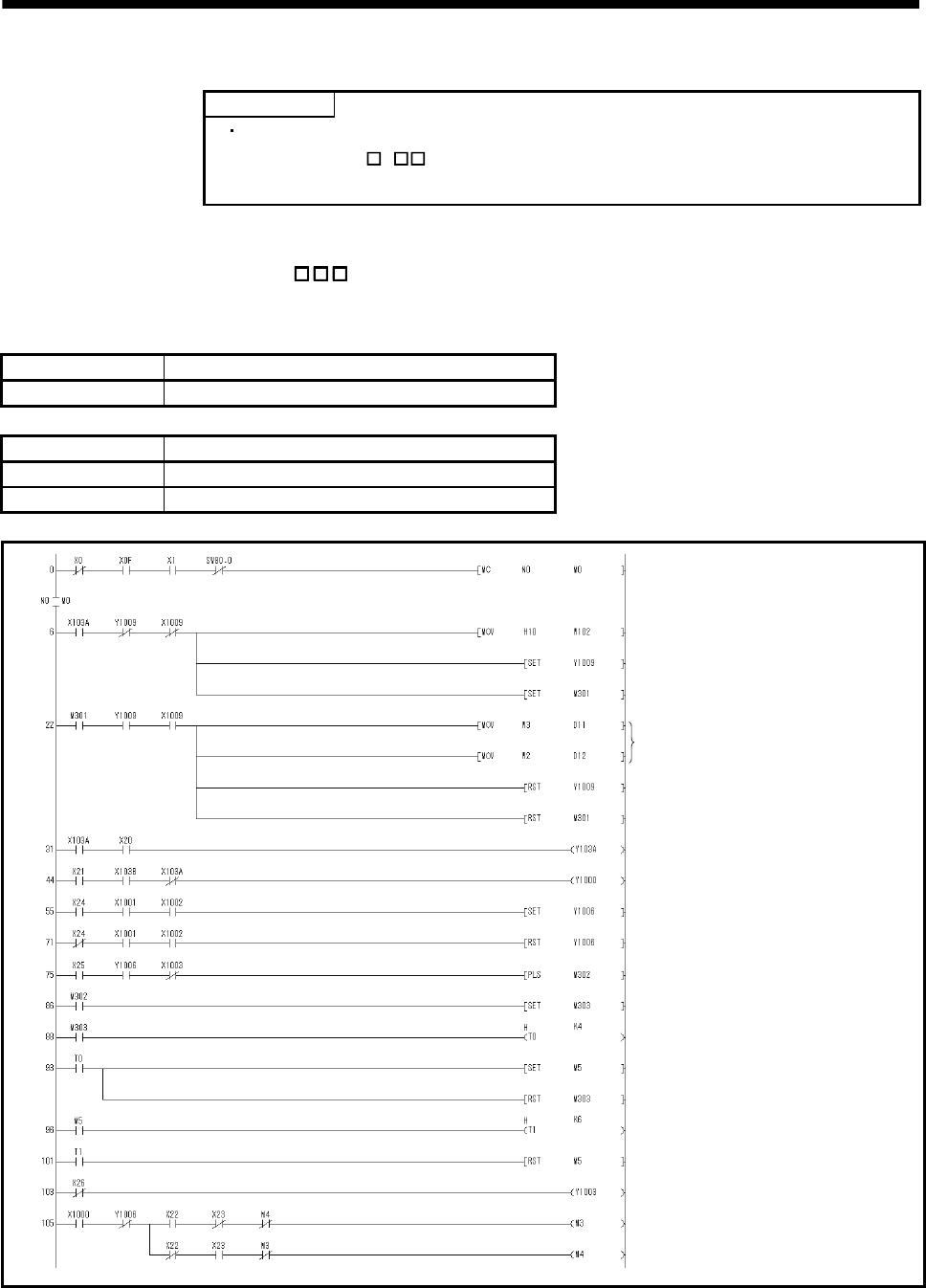
3.8.4 Program example when 2 stations are occupied
POINT
To execute a dog type home position return with the CC-Link communication
functions, set "
0 " in parameter No.PD14 and use Proximity dog (DOG)
with the remote input (RY03) in this example.
Operate the servo amplifier of station 1 in the positioning mode and read the "motor speed" data.
Preset the parameter No.PC30 to "
2".
Operation: Alarm reset, dog type home position return, JOG operation, automatic operation under point table
command
Code No. Description
H0016 32-bit data of motor speed (hexadecimal)
Code No. Description
K50000 Position command data (decimal)
K100 Speed command data (decimal)
Reset command
Servo-on command
Automatic/manual selection
Home position return
command
Home position return completion
Automatic/manual selection
Forward rotation JOG command
Reverse rotation JOG command
Proximity dog command
Forward rotation start request
Reverse rotation start request
Automatic operation mode selection (RY06)
Manual operation mode selection (RY06)
Home position return request
Forward rotation start request
Forward rotation start request reset
Proximity dog command (RY03)
Command request time 6ms *1
Checks data link status of station No.1.
Point table establishment time 4ms *1
Writes current alarm read (H0010) to RWw2 at
trouble (RX3A) occurrence.
Turns on instruction code execution demand
(RY09).
Reads current alarm (RWr3) and respond code
(RWr2) to D11 and D12 when instruction code
execution completion (RX09) turns on.
Turns off instruction code execution demand
(RY09).
Alarm reset command (RY3A)
Servo-on command (RY00)