



















16 - 106
16. INDEXER POSITIONING OPERATION
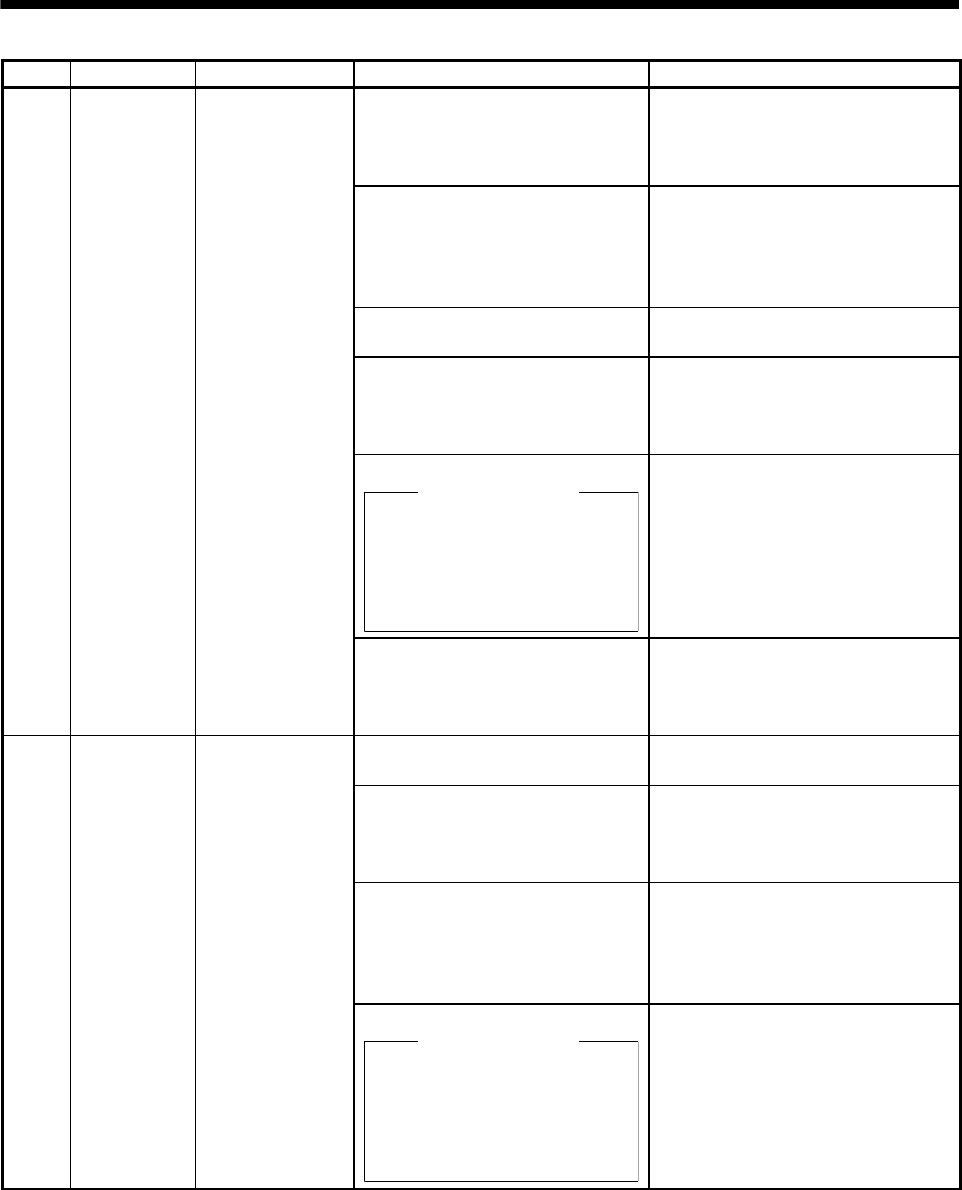
Display Name Definition Cause Action
A50 Overload 1 Load exceeded
overload protection
characteristic of
servo amplifier.
1. Servo amplifier is used in excess of
its continuous output current.
1. Reduce load.
2. Check operation pattern.
3. Use servo motor that provides larger
output.
2. Servo system is instable and
hunting.
1. Repeat acceleration/deceleration to
execute auto tuning.
2. Change auto tuning response setting.
3. Set auto tuning to OFF and make gain
adjustment manually.
3. Machine struck something. 1. Check operation pattern.
2. Install limit switches.
4. Wrong connection of servo motor.
Servo amplifier's output terminals U,
V, W do not match servo motor's
input terminals U, V, W.
Connect correctly.
5. Encoder faulty.
Checking method
When the servo motor shaft is
rotated with the servo off, the
cumulative feedback pulses do not
vary in proportion to the rotary angle
of the shaft but the indication skips
or returns midway.
Change the servo motor.
6. After Overload 2 (A51) occurred, turn
OFF/ON the power supply to clear
the alarm. Then the overload
operation is repeated.
1. Reduce load.
2. Check operation pattern.
3. Use servo motor that provides larger
output.
A51 Overload 2 1. Machine struck something. 1. Check operation pattern.
2. Install limit switches.
Machine collision or
the like caused max.
For the time of the
alarm occurrence,
refer to the section
13.1.
2. Wrong connection of servo motor.
Servo amplifier's output terminals U,
V, W do not match servo motor's
input terminals U, V, W.
Connect correctly.
3. Servo system is instable and
hunting.
1. Repeat acceleration/deceleration to
execute auto tuning.
2. Change auto tuning response setting.
3. Set auto tuning to OFF and make gain
adjustment manually.
4. Encoder faulty.
Checking method
When the servo motor shaft is
rotated with the servo off, the
cumulative feedback pulses do not
vary in proportion to the rotary angle
of the shaft but the indication skips
or returns midway.
Change the servo motor.