



















5 - 15
5. OPERATION
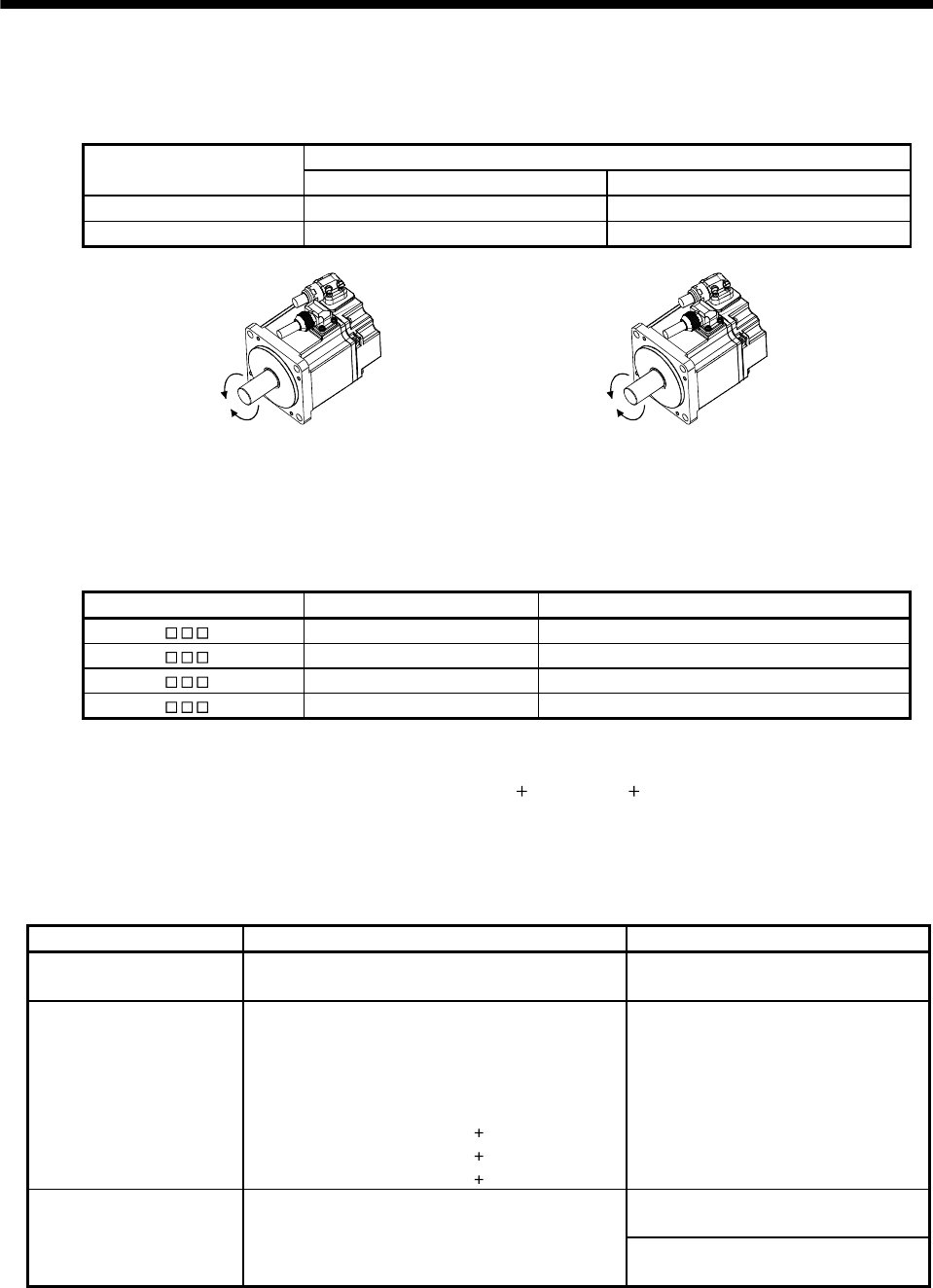
2) Forward rotation direction selection (parameter No.PA14)
Choose the servo motor rotation direction at the time when the forward rotation start (RYn1) signal or
reverse rotation start (RYn2) signal is switched on.
Servo motor rotation direction
Parameter No.PA14 setting
Forward rotation start (RYn1) ON Reverse rotation start (RYn2) ON
0 CCW rotation (address incremented) CW rotation (address decremented)
1 CW rotation (address incremented) CCW rotation (address decremented)
Parameter No.PA14: 0 Parameter No.PA14: 1
CW
RYn2: ON
CW
RYn1: ON
RYn2: ON
CCW
RYn1: ON
CCW
3) Feed length multiplication selection (parameter No.PA05)
Set the unit multiplication factor (STM) of position data.
Parameter No.PA05 setting Feed unit [μm] Position data input range [mm]
0 1 0 to 999.999
1 10 0 to 9999.99
2 100 0 to 99999.9
3 1000 0 to 999999
(c) Operation
Choosing the point table using RYnA to RYnE, RY(n
2)3 to RY(n 2)5 and turning RYn1 ON starts a
motion in the forward rotation direction over the moving distance of the position data at the preset speed
and acceleration time constant.
Turning RYn2 ON starts a motion in the reverse rotation direction according to the values set to the
selected point table.
Item Setting method Description
Automatic operation mode
selection
Automatic/manual selection (RYn6) Turn RYn6 ON.
Point table selection
Point table No. selection 1 (RYnA)
Point table No. selection 2 (RYnB)
Point table No. selection 3 (RYnC)
Point table No. selection 4 (RYnD)
Point table No. selection 5 (RYnE)
Point table No. selection 6 (RY(n
2)3)
Point table No. selection 7 (RY(n
2)4)
Point table No. selection 8 (RY(n
2)5)
Refer to section 5.4.1(2).
Forward rotation start (RYn1)
Turn RYn1 ON to start motion in forward
rotation direction.
Start
Reverse rotation start (RYn2)
Turn RYn2 ON to start motion in reverse
rotation direction.