



















16 - 28
16. INDEXER POSITIONING OPERATION
(3) Torque limit
CAUTION
If the torque limit is canceled during servo lock, the servo motor may suddenly
rotate according to position deviation in respect to the command position.
POINT
In the indexer positioning operation, the torque limit 2 becomes automatically
effective depending on the operation status.
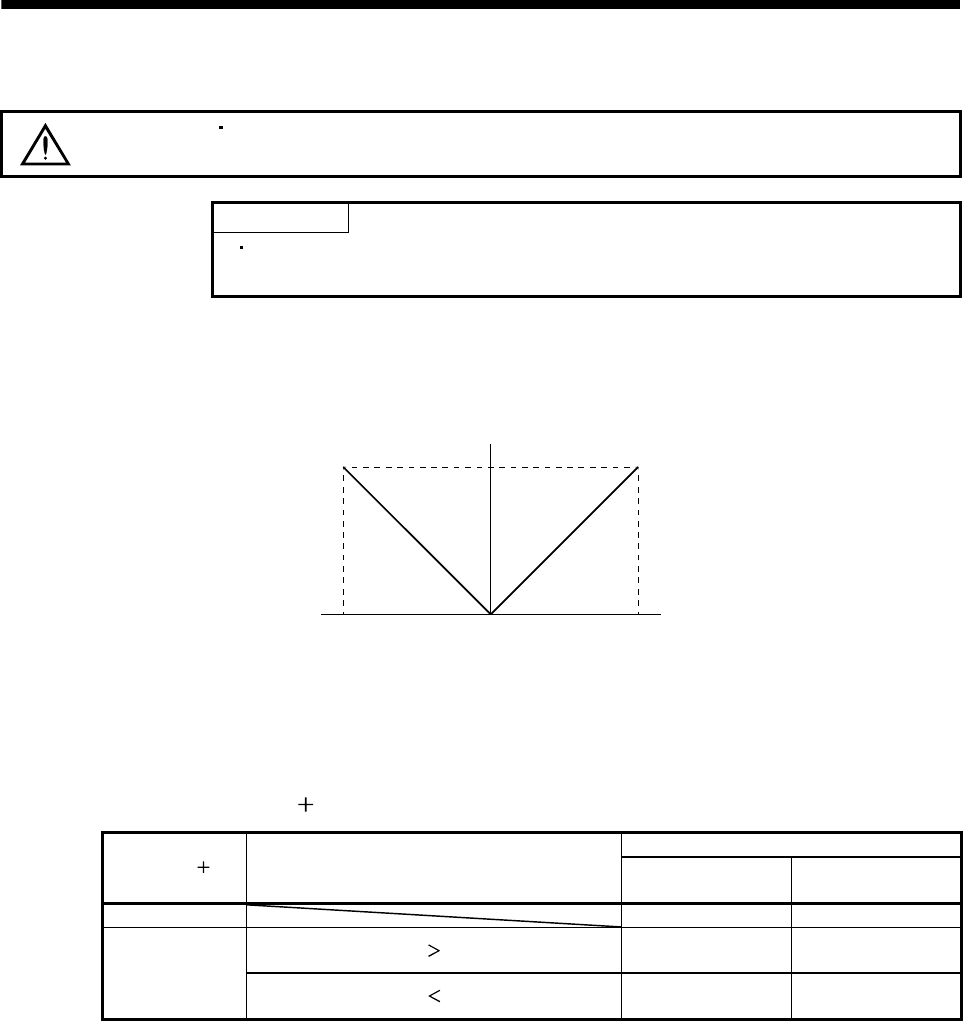
(a) Torque limit and torque
By setting parameter No.PA11 (forward rotation torque limit) or parameter No.PA12 (reverse rotation
torque limit), torque is always limited to the maximum value during operation. A relationship between the
limit value and servo motor torque is shown below.
0 100100
[%]
CW direction Max. torque CCW direction
Torque
Torque limit value in
parameter No.PA12
Torque limit value in
parameter No.PA11
(b) Torque limit value selection
As shown below, the forward rotation torque limit (parameter No.PA11), reverse rotation torque limit
(parameter No.PA12) or internal torque limit 2 (parameter No.PC35) can be chosen using the external
torque limit selection (RY(n
2)6).
Torque limit to be enabled
(Note) RY(n 2) 6 Limit value status
CCW driving/CW
regeneration
CW driving/CCW
regeneration
0 Parameter No.PA11 Parameter No.PA12
Parameter No.PC35
Parameter No.PA11
Parameter No.PA12
Parameter No.PA11 Parameter No.PA12
1
Parameter No.PC35
Parameter No.PA11
Parameter No.PA12
Parameter No.PC35 Parameter No.PC35
Note. 0: OFF
1: ON
(c) Limiting torque (RXn4)
RXn4 turns on when the servo motor torque reaches the torque limited.