


















6 - 39
6. PARAMETERS
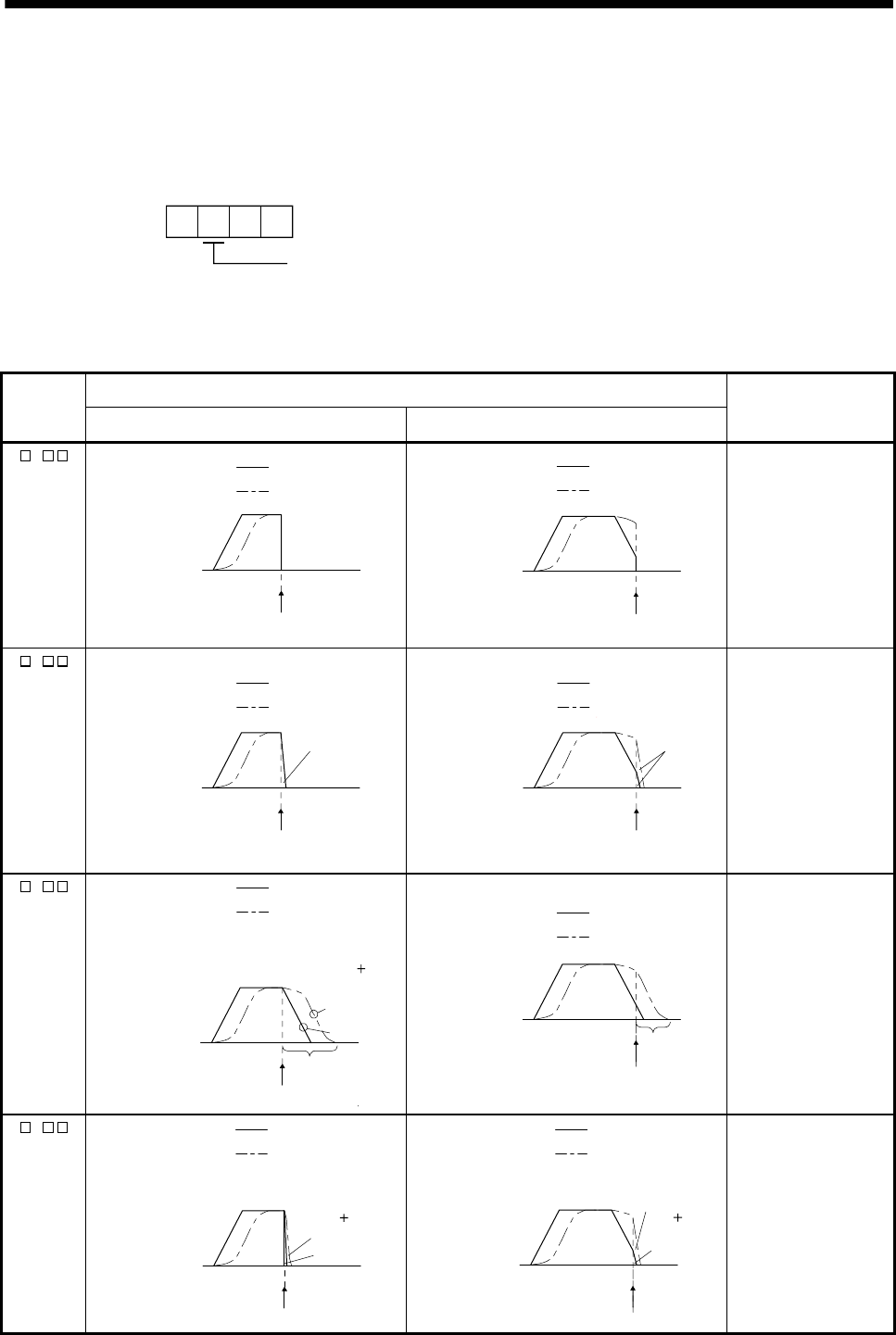
6.4.4 Stopping method when a software limit is detected
A stopping method of the servo motor when a software limit (parameter No.PC31 to PC34) is detected can be
selected. The software limit imposes a limit on the command position, which is controlled in the servo amplifier.
Therefore, actual stop position does not reach to the software limit set position.
Stopping method used when software limit is detected
0: Sudden stop (home position erased)
1: Slow stop (home position erased)
2: Slow stop (Deceleration to a stop by deceleration time constant)
3: Sudden stop (Stop by remaining move distance clear)
Parameter No.PD20
Operation status
Setting
value of
parameter
No.PD20
When rotating at constant speed When decelerating to stop
Remarks
0
(Initial
value)
Software limit detected
Servo moto
r
s
peed
0r/min
With S-pattern
acceleration/deceleration
Without S-pattern
acceleration/deceleration
Software limit detected
Servo moto
r
s
peed
0r/min
With S-pattern
acceleration/deceleration
Without S-pattern
acceleration/deceleration
Clears droop pulses
and stops.
Erases the home
position.
A difference occurs
between the command
position and the current
position.
Execute a home
position return again.
1
Software limit detected
Servo motor
speed
0r/min
With S-pattern
acceleration/deceleration
Without S-pattern
acceleration/deceleration
Amount of
droop pulse
Software limit detected
Servo moto
r
s
peed
0r/min
With S-pattern
acceleration/deceleration
Without S-pattern
acceleration/deceleration
Amount of
droop pulse
Moves for the amount
of droop pulse and
stops.
Erases the home
position.
A difference occurs
between the command
position and the current
position.
Execute a home
position return again.
2
Software limit detected
Servo moto
r
s
peed
0r/min
Decelerates to stop
Acceleration/
Deceleration
time constant
Acceleration/
Deceleration
time constant
S-pattern
acceleration/
deceleration
time constant
With S-pattern
acceleration/deceleration
Without S-pattern
acceleration/deceleration
Software limit detected
Servo motor
speed
0r/min
With S-pattern
acceleration/deceleration
Without S-pattern
acceleration/deceleration
Continues
decelerating
to stop
Decelerates to stop at
the deceleration time
constant. Continues to
rotate for the amount of
S-pattern
acceleration/decelerati
on time constant delay.
Keeps the home
position.
3
Software limit detected
Servo moto
r
s
peed
0r/min
Amount of droop
pulse
S-pattern
acceleration/
deceleration
time constant
amount of
droop pulse
With S-pattern
acceleration/deceleration
Without S-pattern
acceleration/deceleration
Software limit detected
Servo moto
r
s
peed
0r/min
With S-pattern
acceleration/deceleration
Without S-pattern
acceleration/deceleration
Amount of
droop pulse
S-pattern
acceleration/
deceleration
time constant
amount of
droop pulse
Moves for the amount
of droop pulse and
stops. Continues to
rotate for the amount of
S-pattern
acceleration/decelerati
on time constant delay.
Keeps the home
position.