



















16 - 58
16. INDEXER POSITIONING OPERATION
16.8 Manual operation mode
For adjusting the machine or home position, JOG operation or indexer JOG operation can be used to move the
position to any position.
16.8.1 Indexer JOG operation
(1) Setting
Set the devices and parameters as indicated below according to the purpose of use. In this case, the next
station selection 1 to 8 (RYnA to RYnE and RY(n
2)3 to RY(n 2)5) and the speed selection 1 to 3
(RY(n
2)C to RY(n 2)E) are invalid.
Item Device/Parameter Setting description
Indexer positioning operation
selection
Parameter No.PA01 1 : Select the indexer positioning
operation.
Manual operation mode selection Operation mode selection 1 (RYn6) Turn on RYn6.
Operation mode selection 2 (RYn7) Turn off RYn7.
Indexer JOG operation selection Parameter No.PC45 Set it to " 0 (Initial value)"
Station No. direction Parameter No.PA14 Refer to (2) in this section.
JOG speed Point table No.1 Use the servo motor speed in the point table
No.1.
Acceleration/deceleration time
constant
Point table No.1 Use the acceleration/deceleration time constant
in the point table No.1.
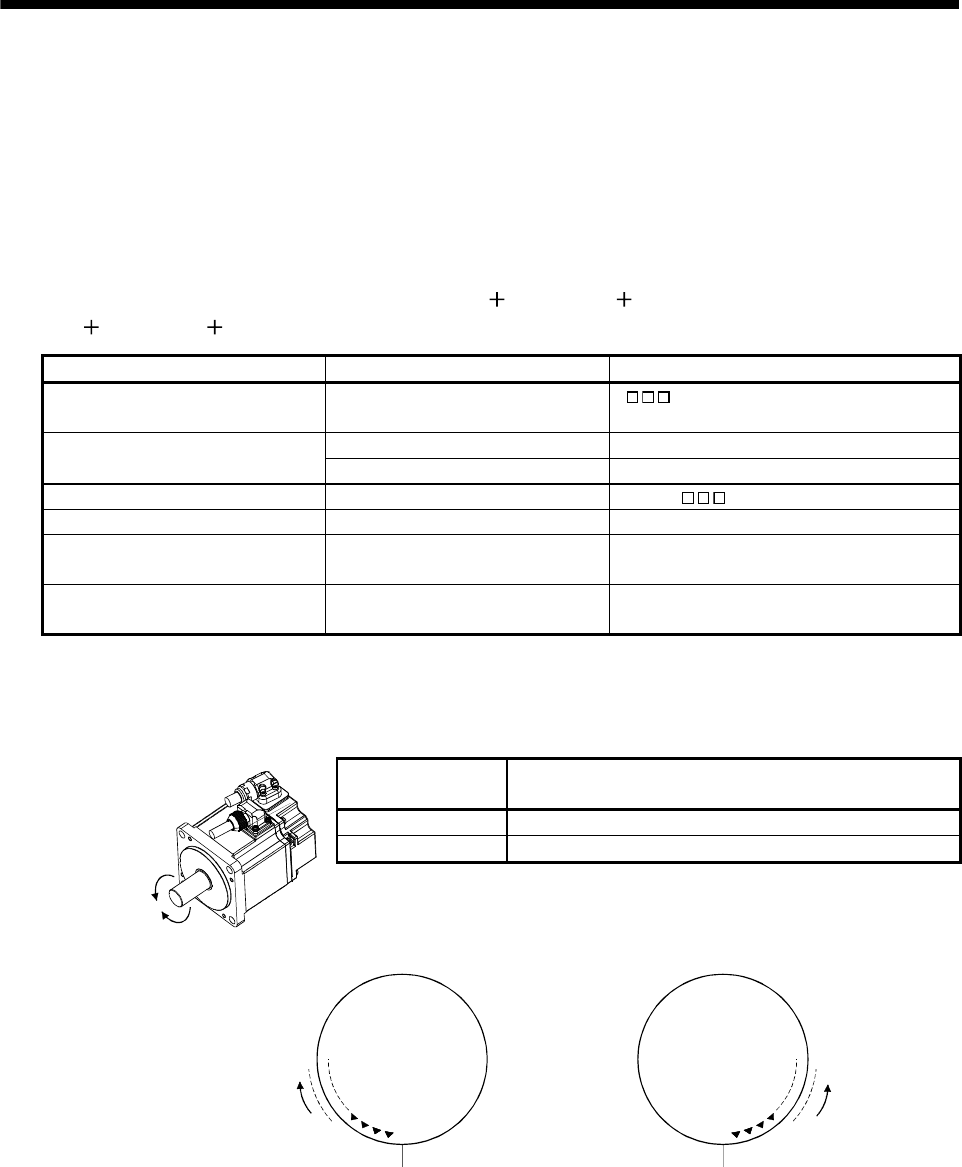
(2) Setting the allocation direction of station numbers
Select the allocation direction of station numbers using the parameter No.PA14 (Station No. direction
selection).
Parameter No.PA14
setting
Station No. allocation direction
Start (RYn1) ON
0 (Initial value) Station No. is allocated in CW direction in order of 1, 2, 3…
1 Station No. is allocated in CCW direction in order of 1, 2, 3…
CW
CCW
Station No.
1
2
3
4
CW
direction
Station No.
1
2
3
4
CCW
direction
Parameter No.PA14: 0 (Initial value) Parameter No.PA14: 1