



















15 - 42
15. COMMUNICATION FUNCTION
(2) Data write
POINT
If setting values need to be changed with a high frequency (i.e. one time or
more per one hour), write the setting values to the RAM, not the EEP-ROM.
The EEP-ROM has a limitation in the number of write times and exceeding
this limitation causes the servo amplifier to malfunction. Note that the number
of write times to the EEP-ROM is limited to approximately 100, 000.
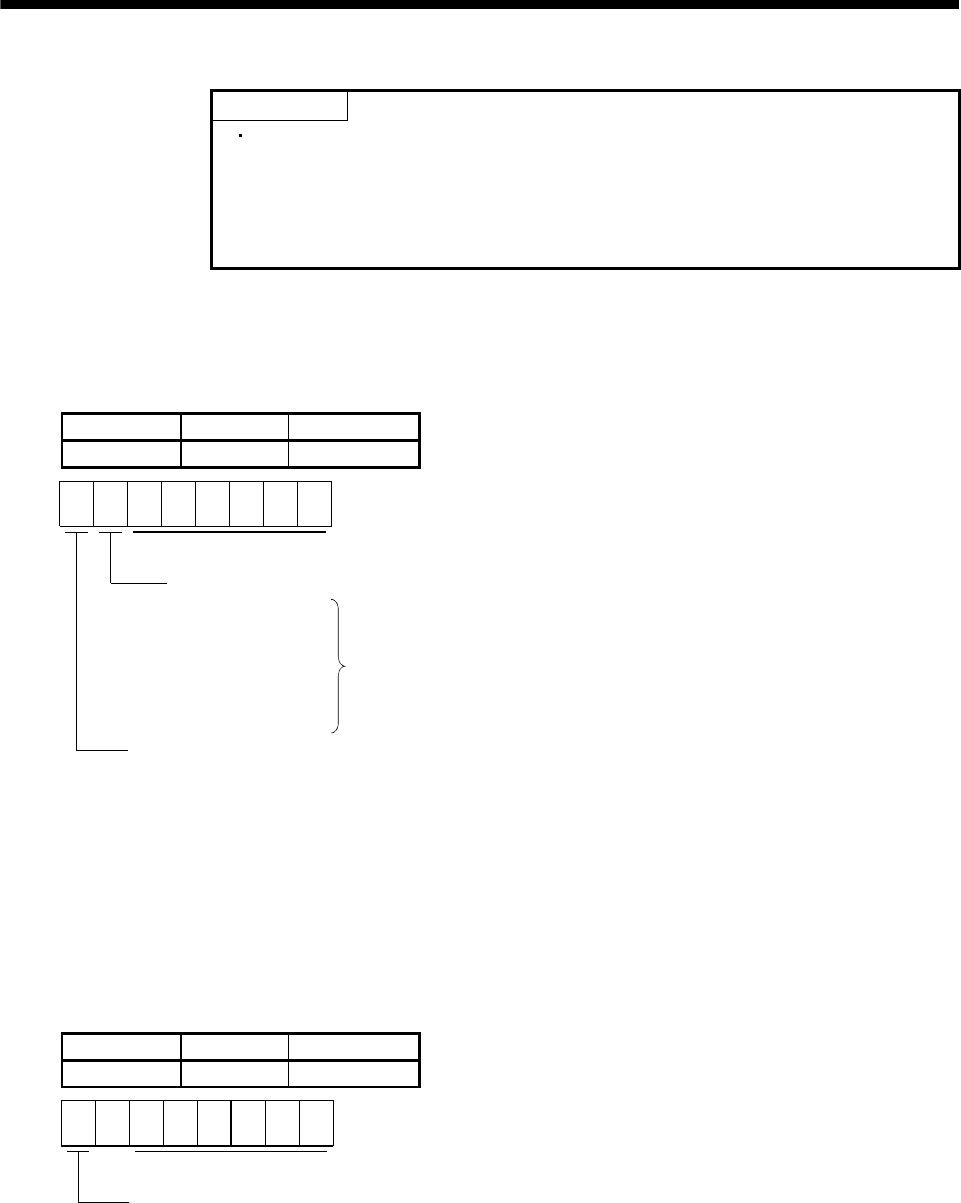
(a) Position data
Write the position data of the point table.
Transmit command [C][0], any of data No. [0][1] to [F][F] corresponding to the point table to be written
to, and the data. Refer to section 15.4.2.
Command Data No. Data
[C][0] [0][1] to [F][F] See below.
Hexadecimal data
The decimal point position should be the same as
the feed length multiplication (STM) set in parameter
No. 1. The slave station will not accept the decimal
point position which is different from the STM setting.
When the position data is changed frequently through communication,
set "1" to the write mode to change only the RAM data in the servo amplifier.
When changing data frequently (once or more within one hour),
do not write it to the EEP-ROM.
Write mode
0: EEP-ROM, RAM write
1: RAM write
Decimal point position
0: No decimal point
1: Lower first digit
2: Lower second digit
3: Lower third digit
4: Lower fourth digit
5: Lower fifth digit
6: Lower sixth digit
(b) Speed data
Write the speed data of the point table.
Transmit command [C][6], any of data No. [0][1] to [F][F] corresponding to the point table to be written
to, and the data. Refer to section 15.4.2.
Command Data No. Data
[C][6] [0][1] to [F][F] See below.
0
Hexadecimal data
Write mode
0: EEP-ROM, RAM write
1: RAM write
When the speed data is changed frequently through communication,
set "1" to the write mode to change only the RAM data in the servo amplifier.
When changing data frequently (once or more within one hour),
do not write it to the EEP-ROM.