



















16 - 27
16. INDEXER POSITIONING OPERATION
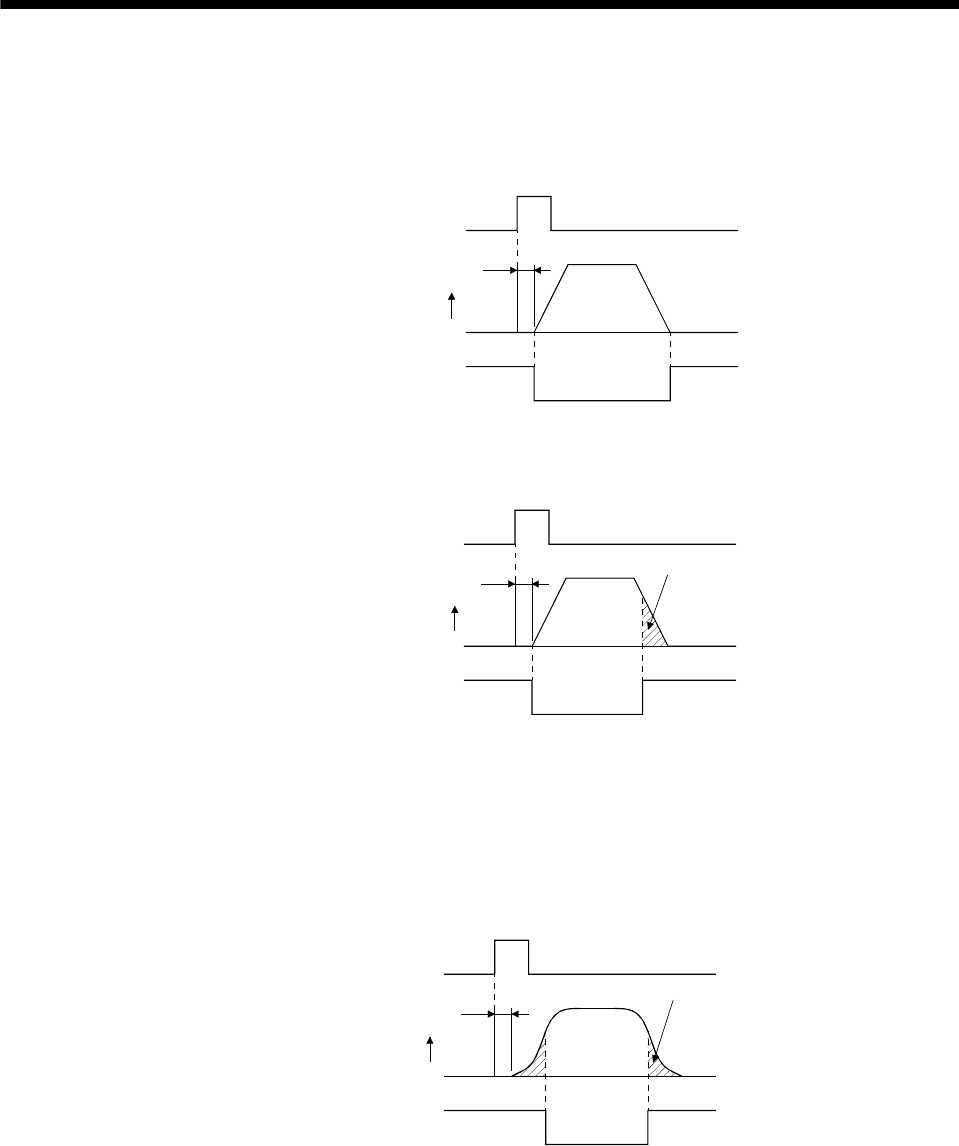
(b) Rough match
The following timing charts show the relationships between the signal and the position command
generated in the servo amplifier. This timing can be changed using parameter No.PC11 (rough match
output range). RXn2 turns ON in the servo-on status.
Forward
rotation
0r/min
ON
OFF
ON
OFF
Position command
Rough match (RXn2)
3ms or less
Start (RYn1)
When "0" is set in parameter No.PC11
Forward
rotation
0r/min
ON
OFF
ON
OFF
Position command
Rough match (RXn2)
3ms or less
Rough match output range
Start (RYn1)
When more than "0" is set in parameter No.PC11
(c) In position
The following timing chart shows the relationship between the signal and the feedback pulse of the
servo motor. This timing can be changed using parameter No.PA10 (in-position range). turns on RYn1
in the servo-on status.
Forward
rotation
0r/min
ON
OFF
ON
OFF
Servo motor speed
In position (RXn1)
3ms or less
In-position range
Start (RYn1)
When positioning operation is performed once