



















3 - 53
3. CC-LINK COMMUNICATION FUNCTIONS
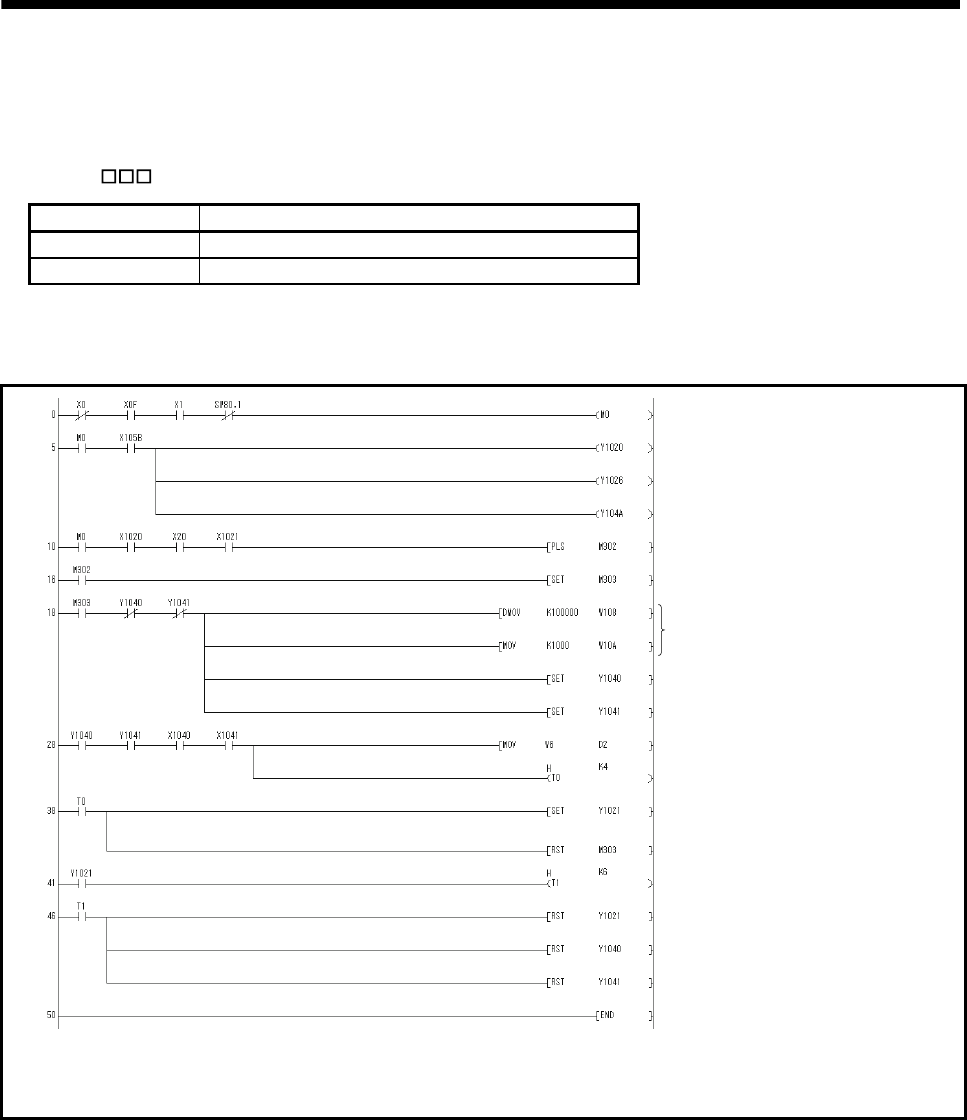
(2) Remote register-based position data/speed data setting
The following program example is only applicable when two stations are occupied.
Operate the servo amplifier of station 2 after specifying the position data as "100000" and the speed data
as "1000" in the direct specification mode.
Preset "
2" in parameter No.PC30.
Set data Description
K100000 Position command data (decimal)
K1000 Speed command data (decimal)
Execute positioning operation with position and speed settings specified in the remote register by turning on
X20.
Checks data link status of station No.2.
Servo-on command (RY20)
Automatic operation mode selection (RY26)
Position/speed specifying system selection
(RY4A)
Writes position command data (K100000) to
RWw8, RWw9, and speed data (K1000) to
RWwA.
Turns on position instruction demand (RY40).
Turns on speed instruction demand (RY41).
Reads respond code (RWr6) to D2 when
position instruction execution completion (RX40)
and speed instruction execution completion
(RX41) turn on.
Position and speed data establishment time
4ms *1
Turns on forward rotation start command
(RY21).
Command request time 6ms *1
Turns off speed instruction demand (RY41).
Turns off position instruction demand (RY40).
Operation
command
In position
Turns off forward rotation start command
(RY21).
*1: This is when the high-speed timer limit is set to 1ms.
Setting time for the timer should be larger than the command processing
time or twice the link scan time whichever larger. When the setting time
is short, the command cannot be received properly.