



















16 - 44
16. INDEXER POSITIONING OPERATION
(b) Other parameter settings
1) Setting the servo motor rotation direction and allocation direction of station numbers
Select the allocation direction of station numbers using the parameter No.PA14 (Station No. direction
selection). Setting is the same as that for when not using the remote register. Refer to (1) (b) 1) in this
section.
2) Setting the number of stations
Set the number of stations in the parameter No.PC46. Setting is the same as that for when not using
the remote register. Refer to (1) (b) 2) in this section.
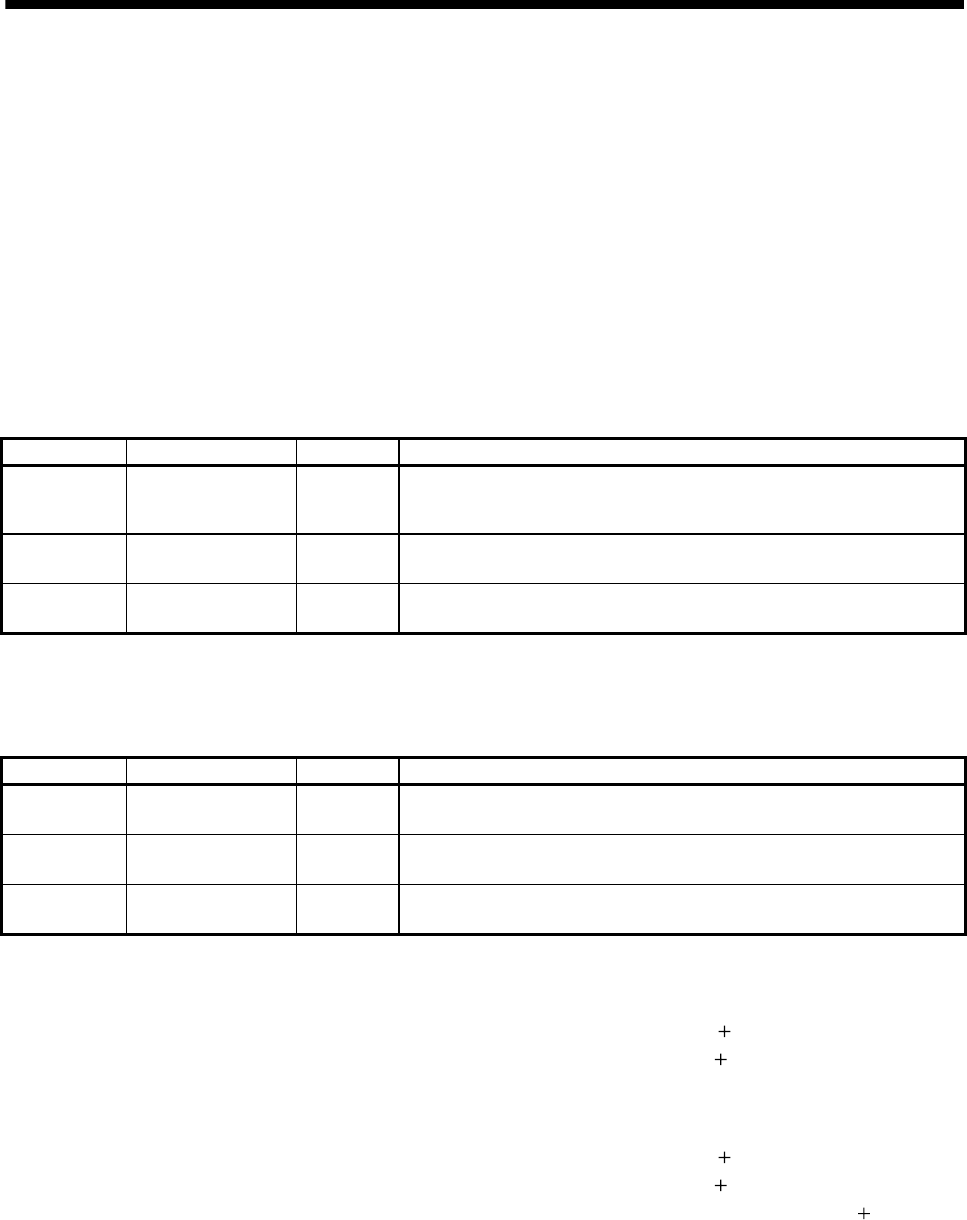
(c) Setting the speed data
1) When using the speed data of point table
Set the servo motor speed, acceleration time constant, and deceleration time constant in the point
table number 1 to 8.
Name Setting range Unit Description
Servo motor
speed
0 to permissible
speed
r/min
Set the command speed of the servo motor for execution of positioning.
The setting should be equal to or less than the instantaneous permissible
speed of the servo motor.
Acceleration
time constant
0 to 20000 ms
Set the time until the rated speed of the servo motor is reached.
Deceleration
time constant
0 to 20000 ms
Set the time until the servo motor running at rated speed comes to a stop.
(2) When directly setting the servo motor speed (only when two stations are occupied)
Set the followings because the acceleration time constant and deceleration time constant of the point table
No.1 are used.
Name Setting range Unit Description
Servo motor
speed
0 to permissible
speed
r/min
Setting is not required.
Acceleration
time constant
0 to 20000 ms
Set the time until the rated speed of the servo motor is reached.
Deceleration
time constant
0 to 20000 ms
Set the time until the servo motor running at rated speed comes to a stop.
(d) Operation
1) When using the speed data of point table
Set the station number for positioning by using the next station (RWwn
4) remote register. Set the
point table number in the point table No./Speed command data (RWwn
6) remote register. Turn on
the start (RYn1) to execute positioning with the speed data set in the point table.
2) When directly setting the servo motor speed (only when two stations are occupied)
Set the station number for positioning by using the next station (RWwn
4) remote register. Set the
servo motor speed in the point table No./Speed command data (RWwn
6) remote register. Turn on
the start (RYn1) to execute positioning with the servo motor speed set in RWwn
6 and the
acceleration time constant and deceleration time constant set in the point table No.1.