

















6 - 27
6. PARAMETERS
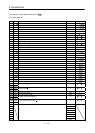
6.3.3 S-pattern acceleration/deceleration
In servo operation, linear acceleration/deceleration is usually made. By setting the S-pattern acceleration/
deceleration time constant (parameter No.PC13), a smooth start/stop can be made. When the S-pattern time
constant is set, smooth positioning is executed as shown below. Note that the time equivalent to the S-pattern
time constant setting increases until positioning (RXnC) is complete.
Servo motor
speed
0 [r/min]
Acceleration time
constant
Rated
speed
Tb Ts
Ta Ts
Tb
Deceleration time
constant
Ta
Preset
speed
Ta: Time until preset speed is reached
Tb: Time until stop
Ts: S-pattern acceleration/deceleration time constant
(parameter No.PC13)
Setting range 0 to 1000ms
6.3.4 Alarm history clear
The alarm history can be confirmed by using the MR Configurator. The servo amplifier stores one current
alarm and five past alarms from when its power is switched on first. To control alarms which will occur during
operation, clear the alarm history using parameter No.PC18 (alarm history clear) before starting operation.
Clearing the alarm history automatically returns to "
0".
This parameter is made valid by switching power off, then on after setting.
000
Alarm history clear
0: Invalid (not cleared)
1: Valid (cleared)
Parameter No.16
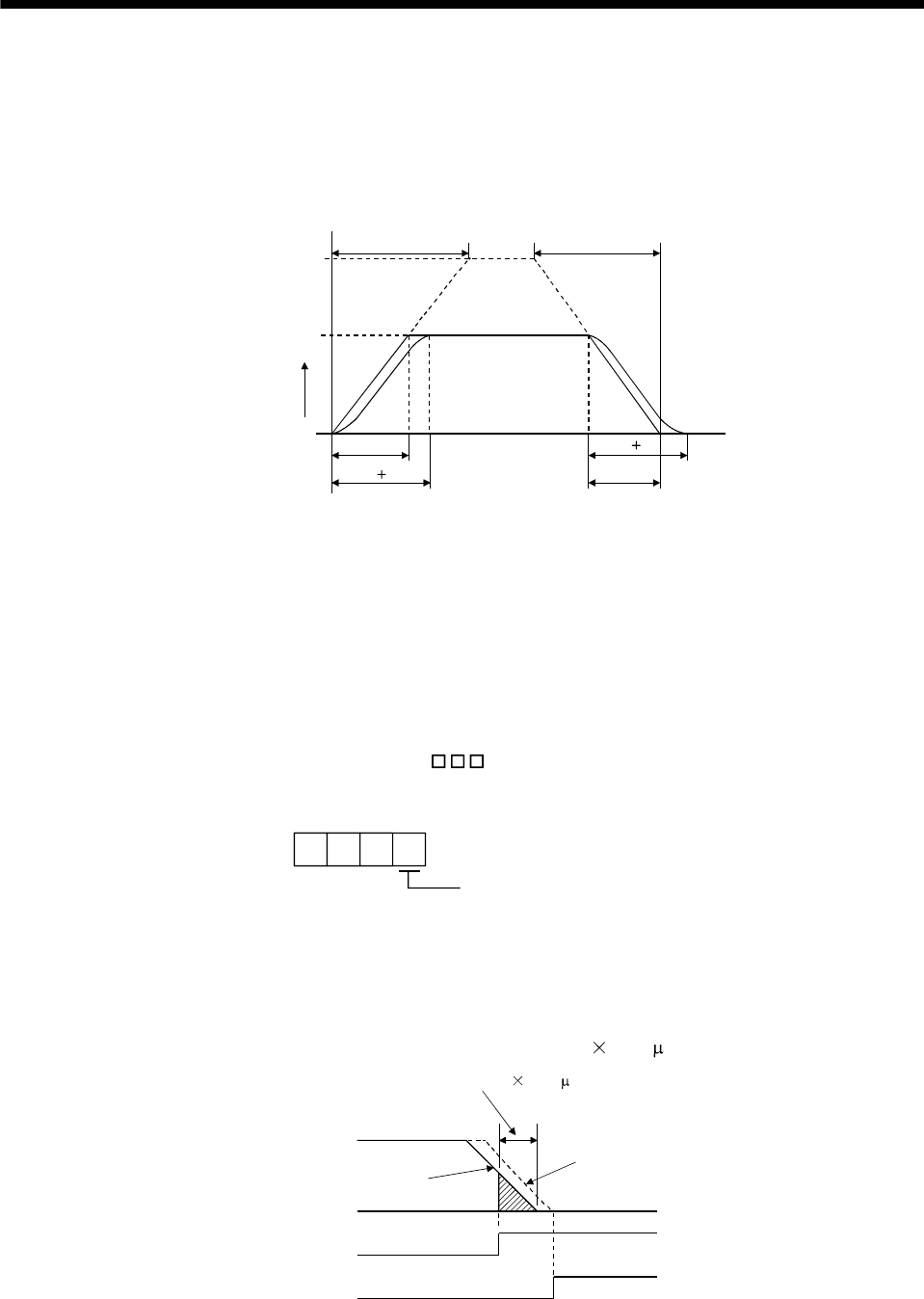
6.3.5 Rough match output
Rough match (RXn2) is output when the command remaining distance reaches the value set in parameter
No.PC11 (rough match output range). The setting range is 0 to 65535 [
10
STM
m].
Servo motor
speed
ON
OFF
ON
OFF
Rough match
(RXn2)
In position (RXnC)
Command pulse
Actual servo motor speed
Command remaining distance ( 10
STM
m)
set in parameter No.PC11