



















16 - 47
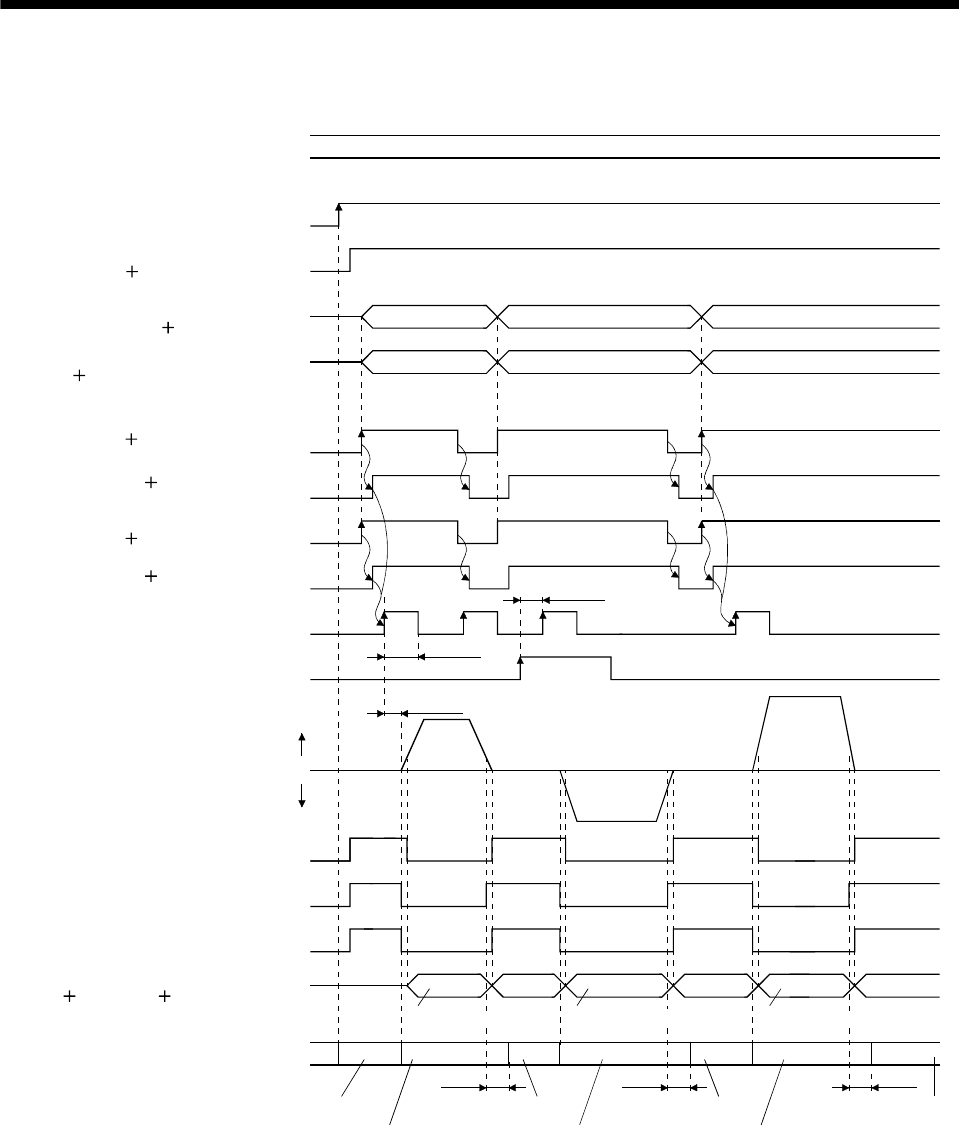
16. INDEXER POSITIONING OPERATION
2) When directly setting the servo motor speed
*3
Speed 1
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
*1
ON
OFF
*2
No.1 No.3 No.1
No.1 No.3 No.1
Speed 2 Speed 3
ON
OFF
ON
(Note 6)
Parameter No.PA11, PA12 Parameter No.PA11, PA12
Parameter No.PC35Parameter No.PC35
Parameter No.PA11, PA12
Parameter No.PC35 Parameter No.PC35
3ms or less
ON
OFF
6ms or more
(Note 3)
4ms or more
ON
OFF
ON
OFF
ON
OFF
ON
OFF
(Note 1)
(Note 7)
Position/speed specifying system
selection (RYn 2)A
(Note 2)
Next station (RWwn 4)
Point table No./Speed command data
(RWwn 6)
Servo-on (RYn0)
Operation mode selection 2
(RYn7)
Operation mode selection 1
(RYn6)
(Note 5)
Servo motor speed
0r/min
(Note 4)
Speed instruction execution
demand (RY(n 2)1)
(Note 4)
Position instruction execution
demand (RY(n 2)0)
Speed instruction execution
completion (RX(n 2)1)
Position instruction execution
completion (RX(n 2)0)
Forward
rotation
Reverse
rotation
Start (RYn1)
Rotation direction specifying
(RYn2)
In position (RXn1)
Rough match (RXn2)
Movement completion (RXnC)
Station output 1 to 8
(RX(n 2)2 to RX(n 2)9)
(Note 6)(Note 6)
Torque limit value to be effective
Out of in-position
range
Out of in-position
range
Out of in-position
range