
















1 - 35
1. FUNCTIONS AND CONFIGURATION
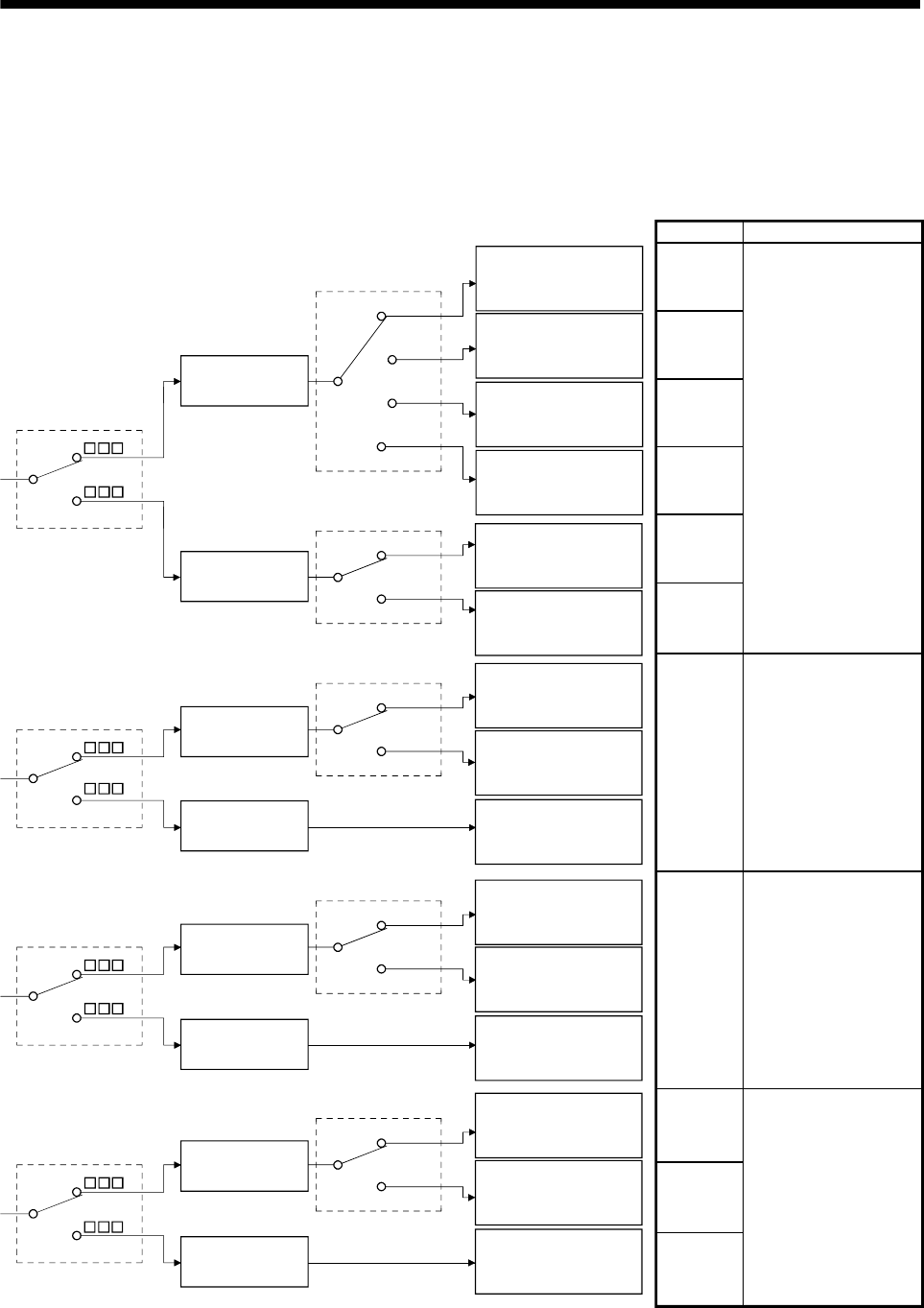
Positioning is started by
making the start signal
valid after selection of
the point table with the
remote input. Using the
auxiliary function,
automatic continuous
operation can be
performed with multiple
point tables.
Section 3.8.2
Section
5.4.2 (1)
Section 3.8.2
Section
5.4.2 (4)(b)1)
Section 3.8.2
Section
5.4.2 (2)
Section 3.8.2
Section
5.4.2 (4)(b)1)
Section 3.8.2
Section
5.4.2 (1)
Section 3.8.2
Section
5.2.2 (4)(b)2)
Section
3.6.3 (2)
Positioning is started by
making the start signal
valid after selection of
the point table with the
remote register. The
auxiliary function cannot
be used.
Reference Main description
Set the position data
directly with the remote
register, and use the
settings of the point table
selected with the remote
register as the servo
motor speed and
acceleration/deceleration
time constants.
Positioning is started by
making the start signal
valid. The auxiliary
function cannot be used.
Section
3.6.3 (1)
Section
3.7.6 (3)
Remote input absolute
value/incremental value
selection (RY(n+2)B)
OFF
ON
OFF
ON
OFF
ON
Point table
auxiliary function
0
1
Parameter No.PA01
Positioning operation is
executed once with
position data handled
as absolute value.
Point table
auxiliary function
1
2
0
3
Absolute value
command
specifying system
Section 3.6.3(3)
Section 3.8.4
Section 5.4.3(1)
Section
3.6.3 (3)
Section
5.4.3 (2)
Section 3.6.3(3)
Section 3.7.6(2)
Section 5.4.3(3)
Set the position data and
servo motor speed
directly with the remote
register.
Use the settings of the
point table No.1 as the
acceleration/deceleration
time constants.
Positioning is started by
making the start signal
valid. The auxiliary
function cannot be used.
Incremental value
command
specifying system
Remote input absolute
value/incremental value
selection (RY(n+2)B)
Remote input absolute
value/incremental value
selection (RY(n+2)B)
Continuous positioning
operation is executed with
position data handled as
absolute values.
Positioning operation is
executed once with
position data handled
as incremental value.
Continuous positioning
operation is executed with
position data handled as
incremental values.
Positioning operation is
executed once in
incremental value
command system.
Continuous positioning
operation is executed
in incremental value
command system.
Positioning operation is
executed once with
position data handled
as absolute value.
Positioning operation is
executed once with
position data handled
as incremental value.
Positioning operation is
executed once in
incremental value
command system.
Positioning operation is
executed once with
position data handled
as absolute value.
Positioning operation is
executed once with
position data handled
as incremental value.
Positioning operation is
executed once in
incremental value
command system.
Positioning operation is
executed once with
position data handled
as absolute value.
Positioning operation is
executed once with
position data handled
as incremental value.
Positioning operation is
executed once in
incremental value
command system.
Absolute value
command
specifying system
Incremental value
command
specifying system
Absolute value
command
specifying system
Incremental value
command
specifying system
Absolute value
command
specifying system
Incremental value
command
specifying system
0
Parameter No.PA01
Parameter No.PA01
Parameter No.PA01
1
0
0
1
1
0
1