


















16 - 5
16. INDEXER POSITIONING OPERATION
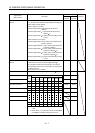
Programmable controller Servo amplifier (RWwn) Servo amplifier Programmable controller (RWrn)
(Note 1)
Address No.
Signal
(Note 1)
Address No.
Signal
RWwn Monitor 1 (Note 2) RWrn Monitor 1 data lower 16 bit
RWwn 1 Monitor 2 (Note 2) RWwn 1 Monitor 1 data upper 16 bit
RWwn 2 Instruction code RWwn 2 Respond code
RWwn 3 Writing data RWwn 3 Reading data
RWwn 4 Next station RWwn 4
RWwn 5 RWwn 5 Monitor 2 data lower 16 bit
RWwn 6 Point table No./Speed command data (Note 3) RWwn 6 Monitor 2 data upper 16 bit
RWwn 7 Not available RWwn 7 Not available
Note 1. "n" depends on the station number setting.
2. Specify the code of the lower 16 bit as the monitor code of 32-bit data.
3. When the parameter No.PC30 setting is "
0
", specify the point table No. in RWwn 6. When the parameter No.PC30
setting is "
1
", specify the speed data in RWwn 6, and turn ON Speed instruction execution demand (RY(n 2)1). When
setting the parameter No.PC30 to "
1 ", always set the acceleration/deceleration time constant in the point table No.1.
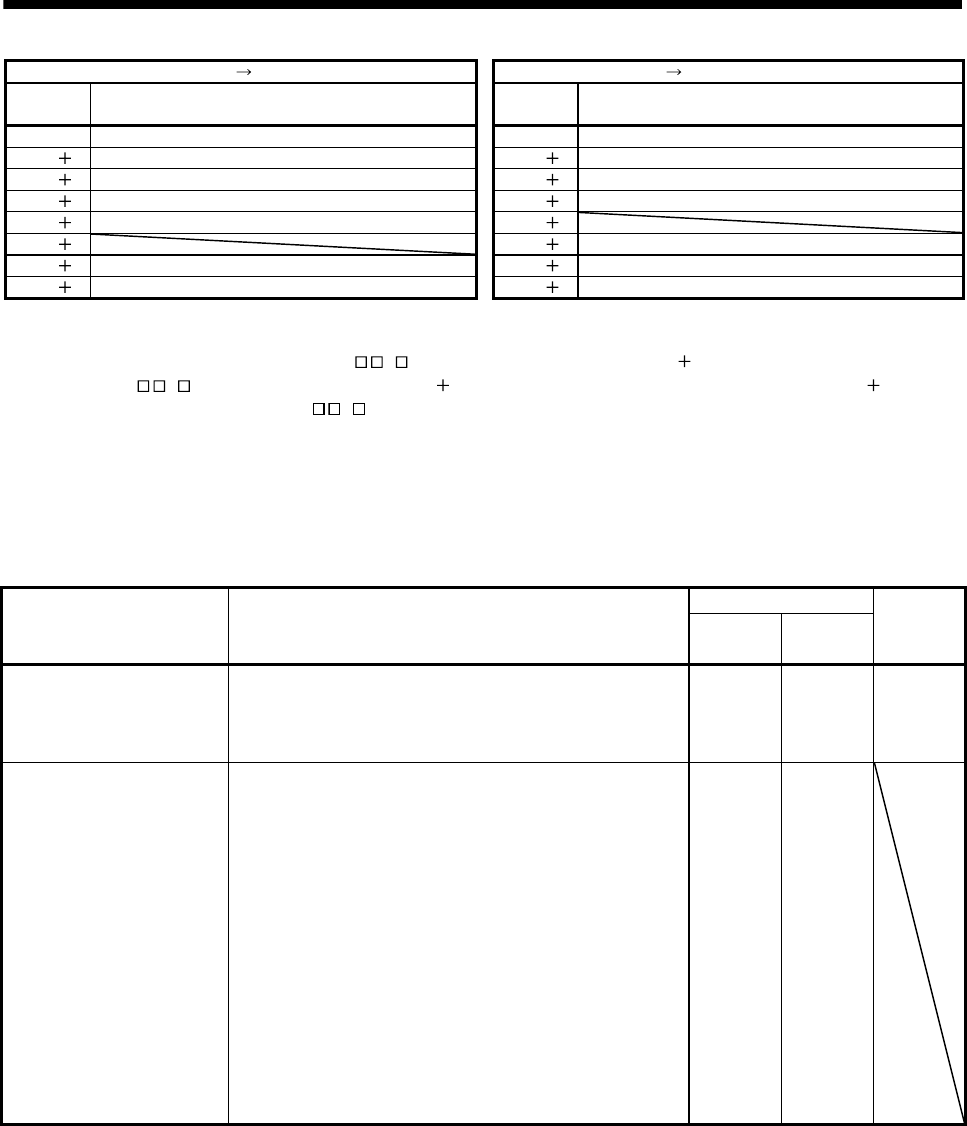
16.2.2 Detailed explanation of I/O signals
(1) Input signals (Input devices)
The note signs in the remarks column indicates the following descriptions.
*: Can be automatic turned ON internally by setting parameters No.PD01.
Device No.
Signal name
(Device name)
Description
1 station
occupied
2 stations
occupied
Remarks
Servo-on Turning RYn0 ON powers on the base circuit, making
operation ready to start. (Servo on status)
Turning it OFF powers off the base circuit, coasting the servo
motor. (Servo off status)
RYn0 RYn0 *
Start 1. Automatic operation mode 1 and 2
Turning on RYn1 performs positioning operation once to the
specified station number.
2. Manual operation mode
Turning on RYn1 in the indexer JOG operation makes the
servo motor rotate in the RYn2 specified direction only while
RYn1 is on. Turning it off makes the servo motor perform
positioning to the station where the servo motor can
decelerate to stop.
Turning on RYn1 in JOG operation makes the servo motor
rotate in the RYn2 specified direction only while RYn1 is on.
Turning it off makes the servo motor decelerate to stop
regardless of stations.
3. Home position return mode
Turning on RYn1 immediately starts a home position return.
RYn1 RYn1