

















6 - 25
6. PARAMETERS
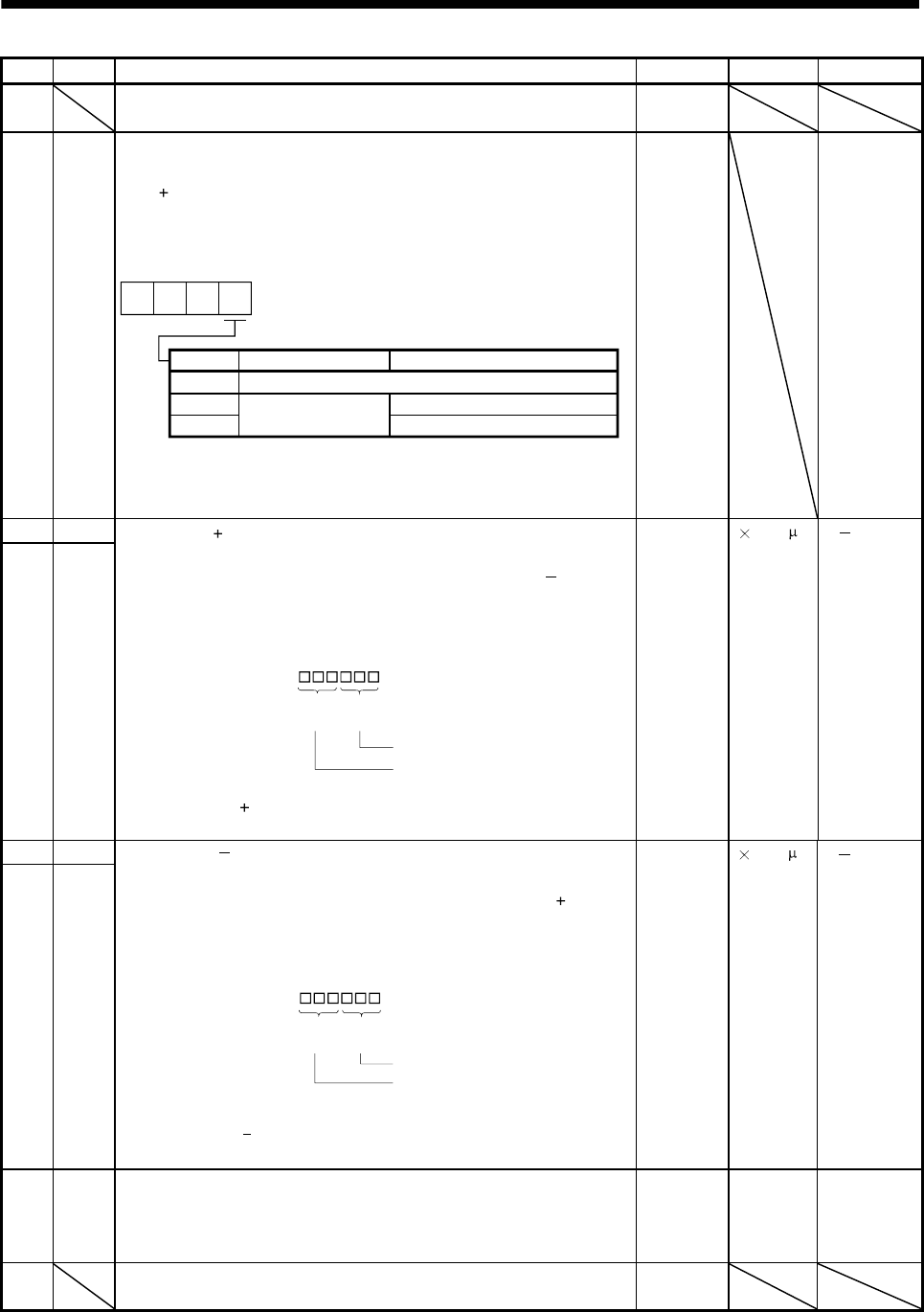
No. Symbol Name and function Initial value Unit Setting range
PC29 For manufacturer setting
Do not change this value by any means
0000h
PC30 *DSS Remote register-based position/speed specifying system selection
This parameter is made valid when Position/speed specification selection
(RY(n
2)A) is turned ON with 2 stations occupied. Select how to receive the
position command and speed command.
When 1 station is occupied, selection of "0001" or "0002" will result in a
parameter error.
Set value
0
1
2
Set the position data.
Specify the point table No.
Set the servo motor speed. (Note)
Specify the point table No.
Position command
Speed command
000
Note. In the case, always set an acceleration/deceleration time constant in
the point table No.1.
0000h Refer to
name and
function
column.
PC31 LMPL
PC32 LMPH
Software limit
Used to set the address increment side software stroke limit. The software
limit is made invalid if this value is the same as in "software limit
".
(Refer to section 6.3.6.)
Set the same sign to parameters No.PC31 and No.PC32. Setting of different
signs will result in a parameter error.
Set address:
Upper 3
digits
Lower 3
digits
Parameter No.PC31
Parameter No.PC32
The software limit is a set of upper digits and lower digits. To change the
value, set in the order of lower digits to upper digits.
0
10
STM
m
999999
to
999999
PC33 LMNL
PC34 LMNH
Software limit
Used to set the address decrement side software stroke limit. The software
limit is made invalid if this value is the same as in "software limit
".
(Refer to section 6.3.6.)
Set the same sign to parameters No.PC33 and PC34. Setting of different
signs will result in a parameter error.
Set address:
Upper 3
digits
Lower 3
digits
Parameter No.PC33
Parameter No.PC34
The software limit is a set of upper digits and lower digits. To change the
value, set in the order of lower digits to upper digits.
0
10
STM
m
999999
to
999999
PC35 TL2 Internal torque limit 2
Set this parameter to limit servo motor torque on the assumption that the
maximum torque is 100[%].
When 0 is set, torque is not produced.
100.0 % 0
to
100.0
PC36 For manufacturer setting
Do not change this value by any means.
0000h