
















16 - 10
16. INDEXER POSITIONING OPERATION
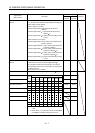
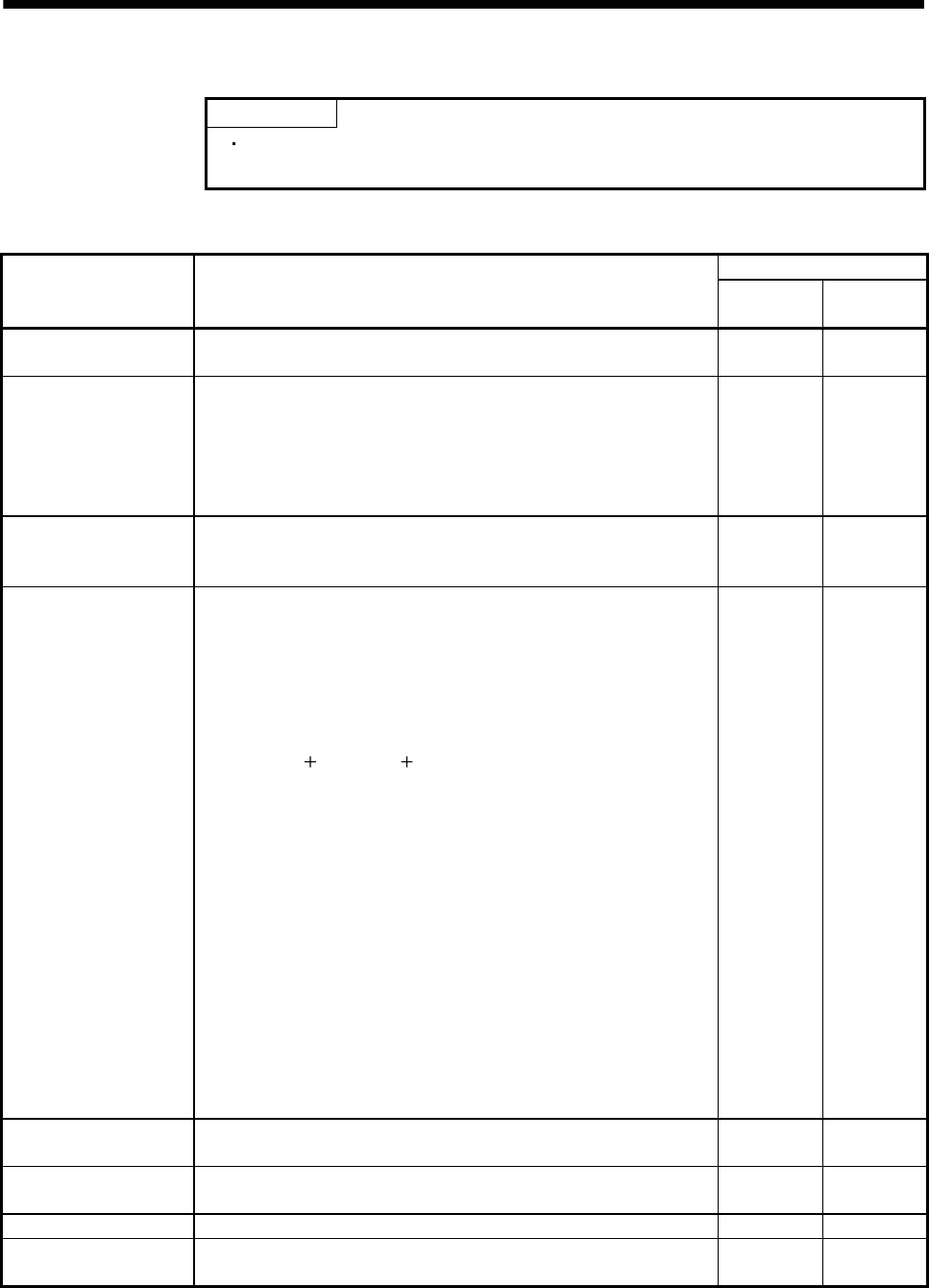
(2) Output signals (Output device)
POINT
The output devices can be used for both the remote output and the external
output signals of CN6 connector.
The signal whose Device No. field has an oblique line cannot be used in CC-Link.
Device No.
Signal name
(Device name)
Description
1 station
occupied
2 stations
occupied
Ready A ready is assigned to the CN6-14 pin as an external output signal. RXn0
turns ON when the servo amplifier is ready to operate after servo-on.
RXn0 RXn0
In position RXn1 turns ON when the droop pulse value is within the preset in-position
range.
The in-position range can be changed using parameter No.PA10.
Increasing the in-position range may result in a continuous conduction
status during low-speed rotation.
RXn1 turns ON at servo-on.
RXn1 RXn1
Rough match RXn2 turns ON when the command remaining distance becomes less than
the rough match output range set in the parameter.
RXn2 turns ON at servo-on.
RXn2 RXn2
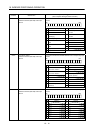
Home position return
completion
The home position return completion is assigned to the CN6-16 pin as an
external output signal. RXn3 turns ON when a home position return is
completed. RXn3 turns ON at completion of a home position return.
In an absolute position detection system, RXn3 turns ON when operation is
ready to start, but turns OFF in any of the following cases.
1) Servo-on (RYn0) is turned OFF.
2) Forced stop (EMG) is turned OFF.
3) Reset (RY(n
1)A or RY(n 3)A) is turned ON.
4) Alarm occurs.
5) Forward rotation stroke end (RYn4) or Reverse rotation stroke end
(RYn5) is turned OFF.
6) Home position return has not been made after product purchase.
7) Home position return has not been made after occurrence of Absolute
position erase (A25) or Absolute position counter warning (AE3).
8) Home position return has not been made after electronic gear change.
9) Home position return has not been made after the absolute position
detection system was changed from invalid to valid.
10) Parameter No.PA14 (Station No. direction selection) has been
changed.
11) While a home position return is being made.
When any of 1) to 11) has not occurred and a home position return is
already completed at least once, Home position return completion (RXn3)
turns to the same output status as Ready (RXn0).
RXn3 RXn3
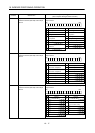
Limiting torque RXn4 turns ON when the torque is reached at the time of torque
generation.
RXn4 RXn4
Electromagnetic brake
interlock
RXn6 turns OFF at servo-off or alarm occurrence. At alarm occurrence, it
turns OFF independently of the base circuit status.
RXn6 RXn6
Monitoring Refer to Monitor output execution demand (RYn8). RXn8 RXn8
Instruction code execution
completion
Refer to Instruction code execution demand (RYn9). RXn9 RXn9